4 cause – Yaskawa MP2200 Machine Controller User Manual
Page 508
10 Troubleshooting
10.1.4 Causes of the “Command Error End” Status (SVB-01 Only)
10-22
10.1.4 Causes of the “Command Error End” Status (SVB-01 Only)
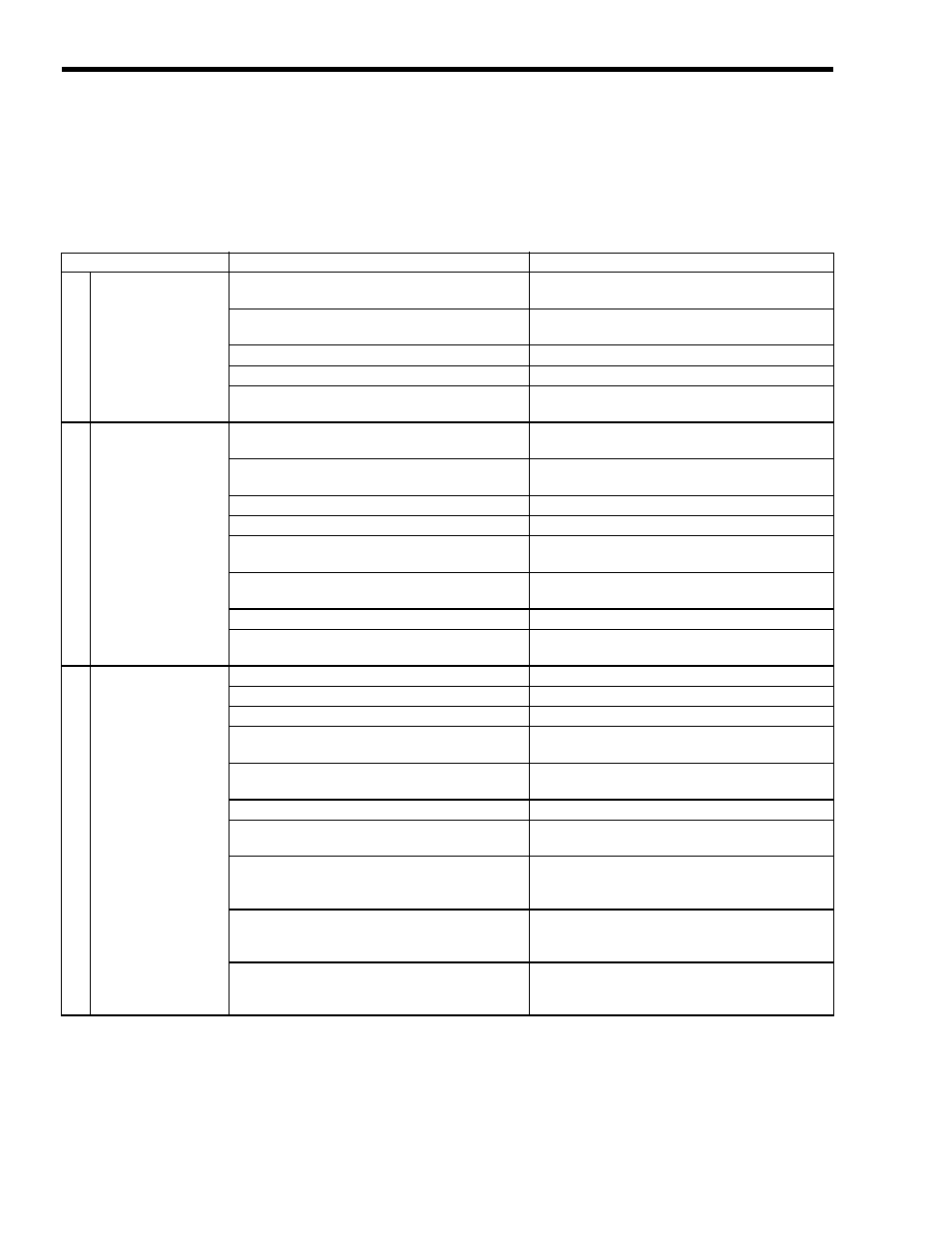
The “Command Error End” status occurs when the specified motion command could not be executed
or could not be completed properly for some reason.
The possible reasons for the Command Error End status depend on the executed motion command.
Motion Command Code
Cause of Command Error End Status
Simultaneously Occurring Warnings or Alarms
1
Positioning
(POSING)
The positioning travel distance exceeded the allowed
value.
“Excessive Positioning Moving Amount” alarm
The axis is an absolute infinite length axis and the
Zero Point Return (Setting) has not been completed.
“Zero Point Not Set” alarm
Servo OFF status
“Servo OFF” alarm
Alarm occurred.
−
Communication is not synchronized.
“Servo Driver Synchronization Communication Error”
alarm
2
External Positioning
(EX_POSING)
The positioning travel distance exceeded the allowed
value.
“Excessive Positioning Moving Amount” alarm
The axis is an absolute infinite length axis and the
Zero Point Return (Setting) has not been completed.
“Zero Point Not Set” alarm
Servo OFF status
“Servo OFF” alarm
Alarm occurred.
−
Communications are not synchronized.
“Servo Driver Synchronization Communication Error”
alarm
A Servo parameter write operation was not completed
within the required time.
“Servo Driver Command Timeout Error” alarm
An A.94 or A.95 warning occurred in the Servo.
“Servo Driver Error” warning
An external signal selection was not within the
allowed range.
“Setting Parameter Error” warning
3
Zero Point Return
(ZRET)
Machine Lock
No alarm or warning
Servo OFF status
“Servo OFF” alarm
Alarm occurred.
−
Communication is not synchronized.
“Servo Driver Synchronization Communication Error”
alarm
A Servo parameter read or write operation was not
completed within the required time.
“Servo Driver Command Timeout Error” alarm
An A.94 or A.95 warning occurred in the Servo.
“Servo Driver Error” warning
The Zero Point Return method (Home Return Type)
setting is not within the allowed range.
“Setting Parameter Error” warning
The Zero Point Return method (Home Return Type) is
set to POT method and the Approach Speed is set to
reverse.
“Setting Parameter Error” warning
The Zero Point Return method (Home Return Type) is
set to NOT method and the Approach Speed is set to
forward.
“Setting Parameter Error” warning
The Home Return Type is set to DEC1 + Phase-C,
ZERO Signal, DEC1 + ZERO, or Phase-C Pulse, and
the OT Signal was ON in the Home Direction.
An OT alarm or OT warning occurred in the Home
Direction.