Yaskawa MP2200 Machine Controller User Manual
Page 50
2 Module Specifications and Connections
2.1.1 General Specifications
2-4
* Only with MECHATROLINK-II
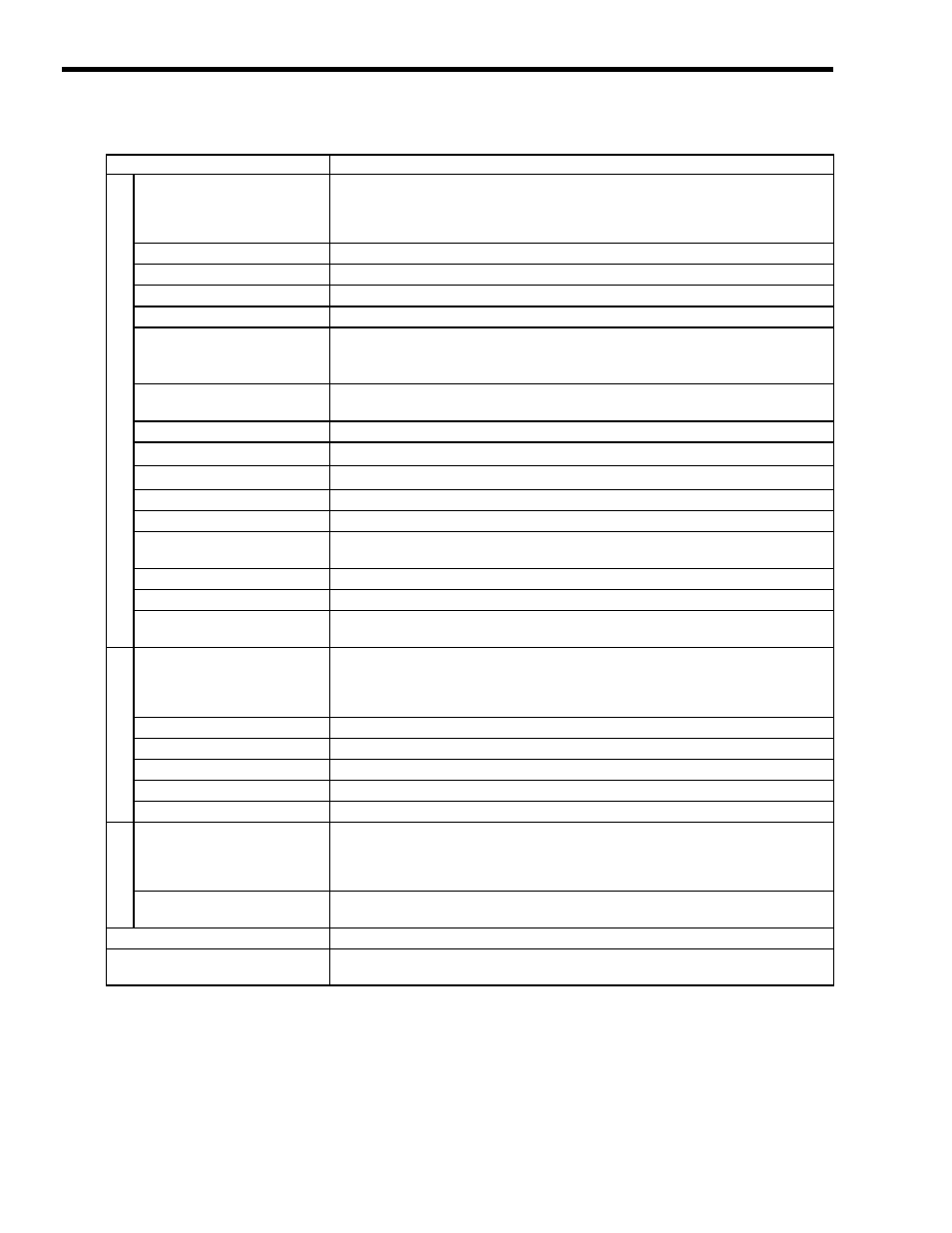
Servo Cont
ro
l
Communication Method
Single-send (communication cycle = transmission cycle) synchronous communication
Transmission/communication error detection (hardware) provided.
Synchronous communication error detection (software) provided.
Automatic recovery function not provided (recovery when alarm cleared).
I/O Registers
Input/output using motion registers (synchronized on high-speed scan)
Command Mode
Motion Command Mode/MECHATROLINK Transparent Command Mode
Supported Servomotors
Standard motors/linear motors/DD motors
Control Type
Position control, speed control, torque control, and phase control
Motion Commands
Positioning, External Positioning, Zero Point Return, Interpolation, Interpolation with
Position Detection, JOG operation, STEP operation, Speed Reference
*
, Torque Reference
*
,
Phase Control, etc.
Acceleration/Deceleration
Method
One-step asymmetric trapezoidal acceleration/deceleration, exponential acceleration/
deceleration filter, moving average filter
Position Unit
pulse, mm, inch, degree
Speed Unit
Reference units/s, 10
n
reference units/min, percentage of rated speed
Acceleration Unit
Reference units/s
2
, ms (acceleration from 0 until rated speed reached)
Torque Unit
Percentage of rated torque
Electronic Gear
Provided.
Position Control Method
Finite length position control, infinite length position control, absolute system infinite length
position control, and simple absolute system infinite length position control
Software Limit
Positive/negative direction for each point
Zero Point Return Method
13 types
SERVOPACK Parameter
Management
Parameters can be managed in the MPE720’s SERVOPACK Parameter Window.
In
vert
er
Control
Communication Method
Single-send (communication cycle = transmission cycle) asynchronous communication
Transmission/communication error detection (hardware) provided.
Synchronous communication error detection (software) not provided.
Automatic recovery function not provided (recovery by clearing alarm).
I/O Registers
Input/output using motion registers (synchronized on high-speed scan)
Command Mode
Motion Command Mode/MECHATROLINK Transparent Command Mode
Control Type
Speed control only (V/F, vector control and other control methods use inverter settings.)
Motion Commands
Inverter I/O control, etc.
Speed Unit
The speed unit depends on the inverter settings.
I/
O C
on
tr
ol
Communication Method
Single-send (communication cycle = transmission cycle) asynchronous communication
Transmission/communication error detection (hardware) provided.
Synchronous communication error detection not provided.
Automatic recovery function not provided.
I/O Registers
Input/output using I/O registers and synchronized on the high-speed scan or low-speed scan
(selectable).
Self-configuration Function
Module and slave devices can be automatically allocated.
Synchronization between Modules
Synchronization supported (enabled when power is cycled) when high-speed scan cycle =
communication cycle times n
(cont’d)
Item
Details