26 ) zero point return – Yaskawa MP2200 Machine Controller User Manual
Page 202
4 Motion Parameters
4.4.2 Motion Setting Parameter Details
4-82
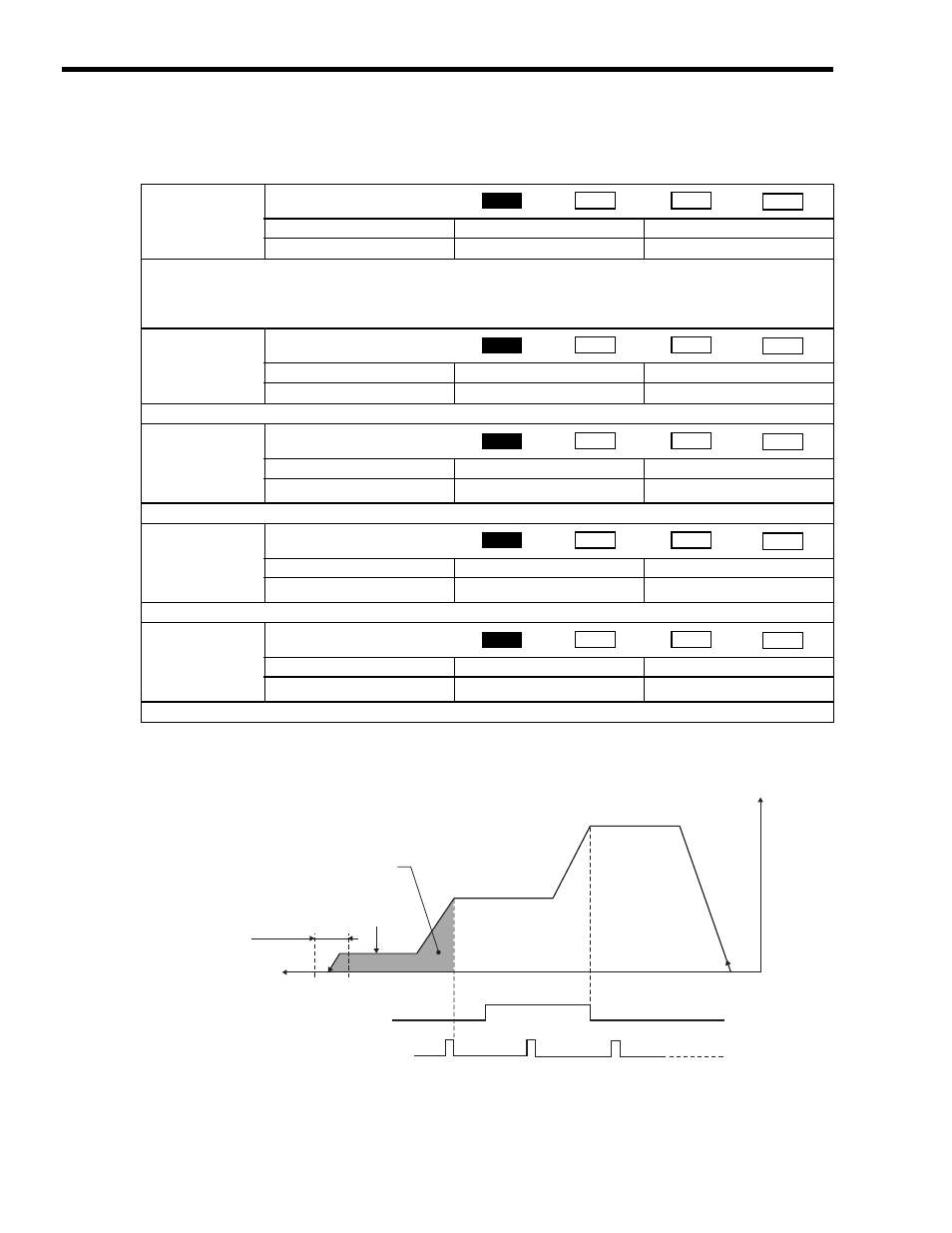
( 26 ) Zero Point Return
A typical example of a Zero Point Return operation is shown below.
Refer to 5.2.3 Zero Point Return (ZRET) for details on zero point return.
OW3C
Home Return Type
Setting Range
Setting Unit
Default Value
0 to 19
−
0
Set the operation method used when the Zero Point Return (ZRET) motion command is executed.
With an incremental encoder, there are 17 different methods that can be used for the Zero Point Return operation.
With an absolute encoder, the axis is returned to the zero point of the machine coordinate system regardless of which method is
being used.
OW3D
Home Window
Setting Range
Setting Unit
Default Value
0 to 65535
Reference unit
100
Set the width in which the Zero Point Position bit (monitoring parameter IB0C4) will be ON.
OL3E
Approach Speed
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Same as Speed Units setting
1000
Set the approach speed (speed after the deceleration limit switch is passed) for Zero Point Return operations.
OL40
Creep Speed
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Same as Speed Units setting
500
Set the creep speed (speed after detection of the Zero Point signal) for Zero Point Return operations.
OL42
Home Offset
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Reference unit
0
Set the distance between the zero point signal position and the zero point position.
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
Speed
Start
(OL
42)
DEC Signal
C-phase Pulse
Creep Speed
Home Offset
Home
Window
(OL
3E)
Approach Speed
(OL
10)
Set Reference Speed