4 virtual motion module (svr) overview, 1 overview, 2 system configuration – Yaskawa MP2200 Machine Controller User Manual
Page 46: 4 virtual motion module (svr) overview -12, 1 overview -12 1.4.2 system configuration -12, Using mp2300, Yaskawa servopack, Virtual servo ax, Ladder program motion program, Info
1 Motion Module Overview
1.4.1 Overview
1-12
1.4 Virtual Motion Module (SVR) Overview
1.4.1 Overview
The Virtual Motion Module (SVR) is a Software Module that provides an interface for virtual axes
that are not actually connected to Servomotors.
The SVR is configured in the same way as the SVB-01 or SVA-01 Motion Module with fixed
parameters, setting parameters, and monitoring parameters, and can be accessed from application
programs using I/O registers.
The SVR can be used to control up to 16 virtual axes in the high-speed scan control cycle.
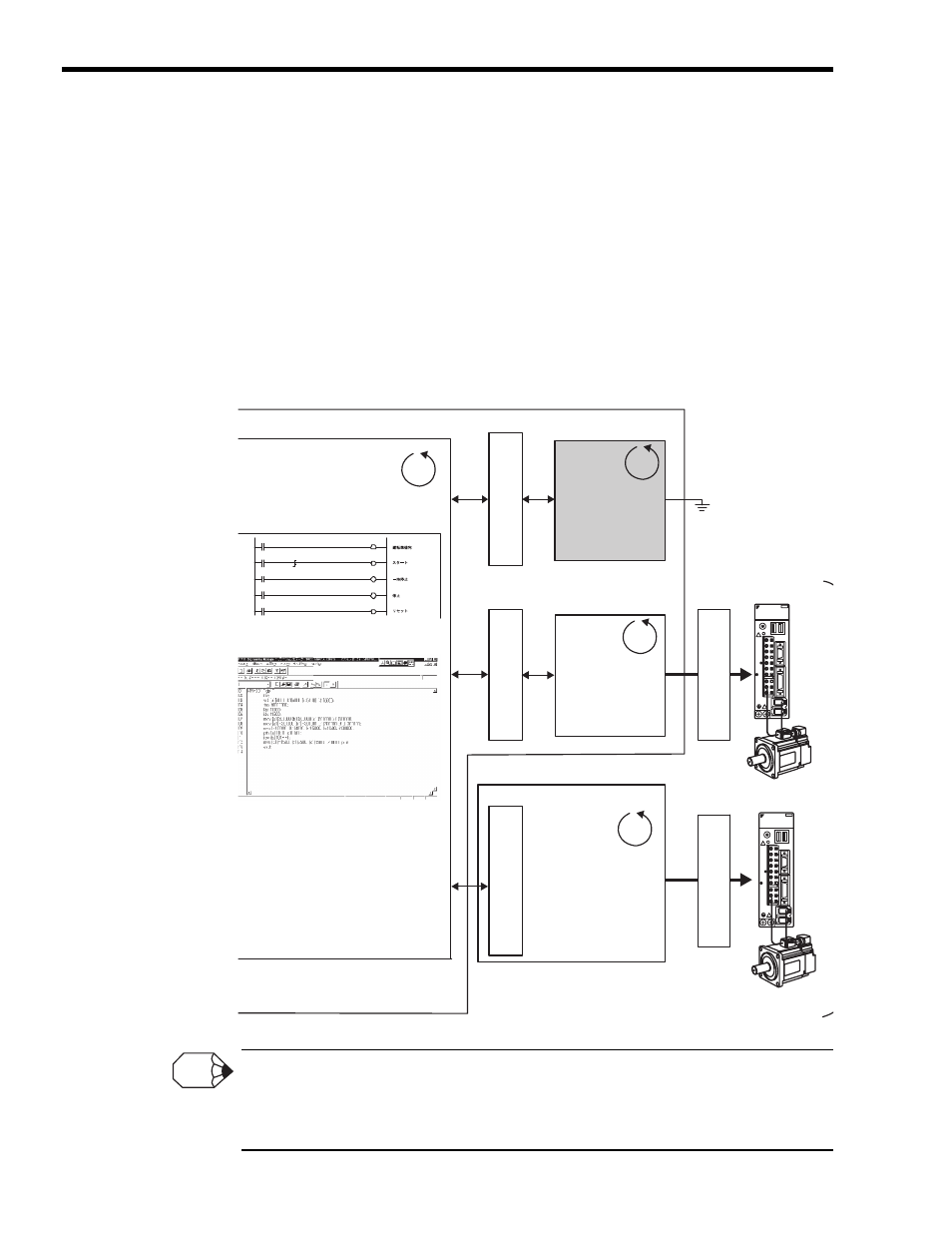
1.4.2 System Configuration
■
Using MP2300
Comparison with SVB-01/SVA-01 Simulation Mode
Simulation mode does not support a positioning function, so the position data is updated to the final
target position for 1 scan. The SVR uses its positioning function to perform distribution and refreshes
the position data for every scan up to the final target position.
Motion Parameters
2300
Motion
Parameters
Motion
Parameters
0000
IB00000
DB000020
DB000010
IB00000
DB00000 0
IB00001
DB000011
0002
0005
IB00002
DB000012
0007
IB00005
DB000015
0009
MECHA
TROLINK
MECHA
TROLINK
YASKAWA SERVOPACK
200V
SGDS-01A12A
SW1
CHARGE
C
N
3
A/B
C
N
1
C
N
2
C
N
4
L1
L2
L2C
L1C
B1/
B2
U
V
W
C
N
6
YASKAWA SERVOPACK
200V
SGDS-01A12A
SW1
CHARGE
C
N
3
A/B
C
N
1
C
N
2
C
N
4
L1
L2
L2C
L1C
B1/
B2
U
V
W
C
N
6
High-speed
scan
Virtual Servo Ax
SVB-01 Motion Module
Optional Module
Ladder program
Motion program
SERVOPACK
Servomotor
SERVOPACK
Servomotor
High-speed
scan
High-speed
scan
High-speed
scan
SVR Virtual
Motion
Module
SVB Motion
Module
INFO