Yaskawa MP2200 Machine Controller User Manual
Page 19
xix
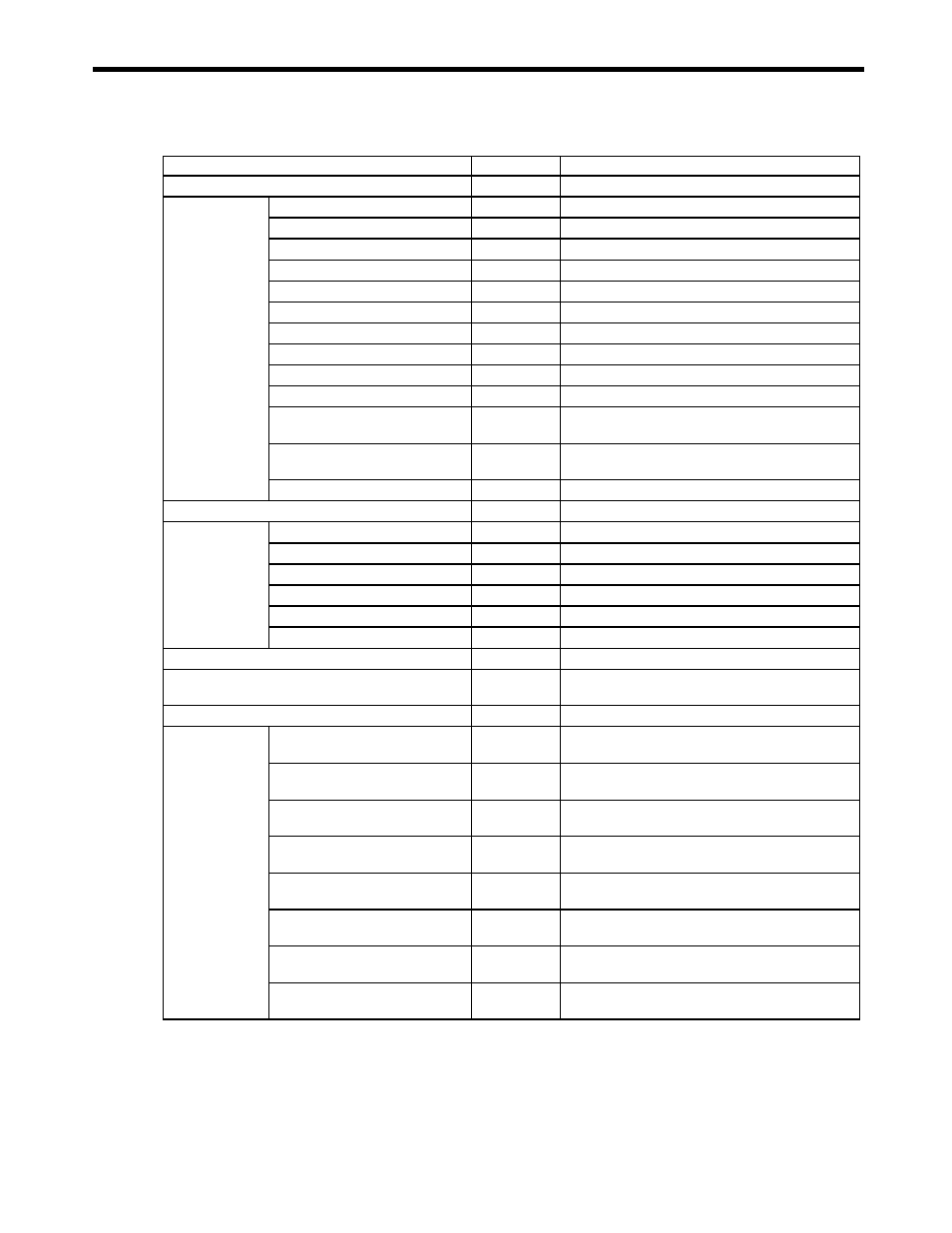
Command
-
Command
Abort
OBxx091
Abort command
Busy
IBxx090
Servo command busy
Complete
IBxx098
Servo command complete
Fail
IBxx093
Servo command failed
GetValue
IWxx08
Servo command response
Hold
IBxx091
Servo command holding
JogRelativeMoveDirection
OBxx092
Selects Jog or Step direction.
Pause
OBxx090
Pause command
Ready
IBxx2C2
Servo status CMDRDY
SetValue
OWxx08
SERVOPACK command
StaticParameterNumber
OWxx5C
The number of the static parameter to be read when
Command2=5
StaticParameterValue
ILxx56
The value of the fixed parameter read by
Command2=5.
Status
IWxx09
Servo command status mask
Command2
-
Command2
Busy
IBxx0B0
Servo Command2 busy
Complete
IBxx0B8
Servo Command2 complete
Fail
IBxx0B3
Servo Command2 Failed
GetValue
IWxx0A
Servo Command2 response
SetValue
OWxx0A
Additional servopack commands
Status
IWxx0B
Servo Command2 status mask
CommandMask
OWxx09
Servo Command options
Deceleration
OLxx38
Deceleration value, units selected by UnitsWord
(OWxx03)
Encoder
-
Encoder
Get.AbsolutePositionLS
ILxx5E
Contains absolute position used in infinite length
applications.
Get.AbsolutePositionMS
ILxx60
Contains absolute position used in infinite length
applications.
Get.ModularPositionLS
ILxx62
Contains modularized position used in infinite length
applications.
Get.ModularPositionMS
ILxx64
Contains modularized position used in infinite length
applications.
Set.AbsolutePositionLS
OLxx5E
Used to set the absolute position used in infinite
length applications.
Set.AbsolutePositionMS
OLxx60
Used to set the absolute position used in infinite
length applications.
Set.ModularPositionLS
OLxx62
Used to set the modularized position used in infinite
length applications.
Set.ModularPositionMS
OLxx64
Used to set the modularized position used in infinite
length applications.
(cont’d)
Variable Name
Register
Comments