3 ) function 1 ( 4 ) function 2 – Yaskawa MP2200 Machine Controller User Manual
Page 190
4 Motion Parameters
4.4.2 Motion Setting Parameter Details
4-70
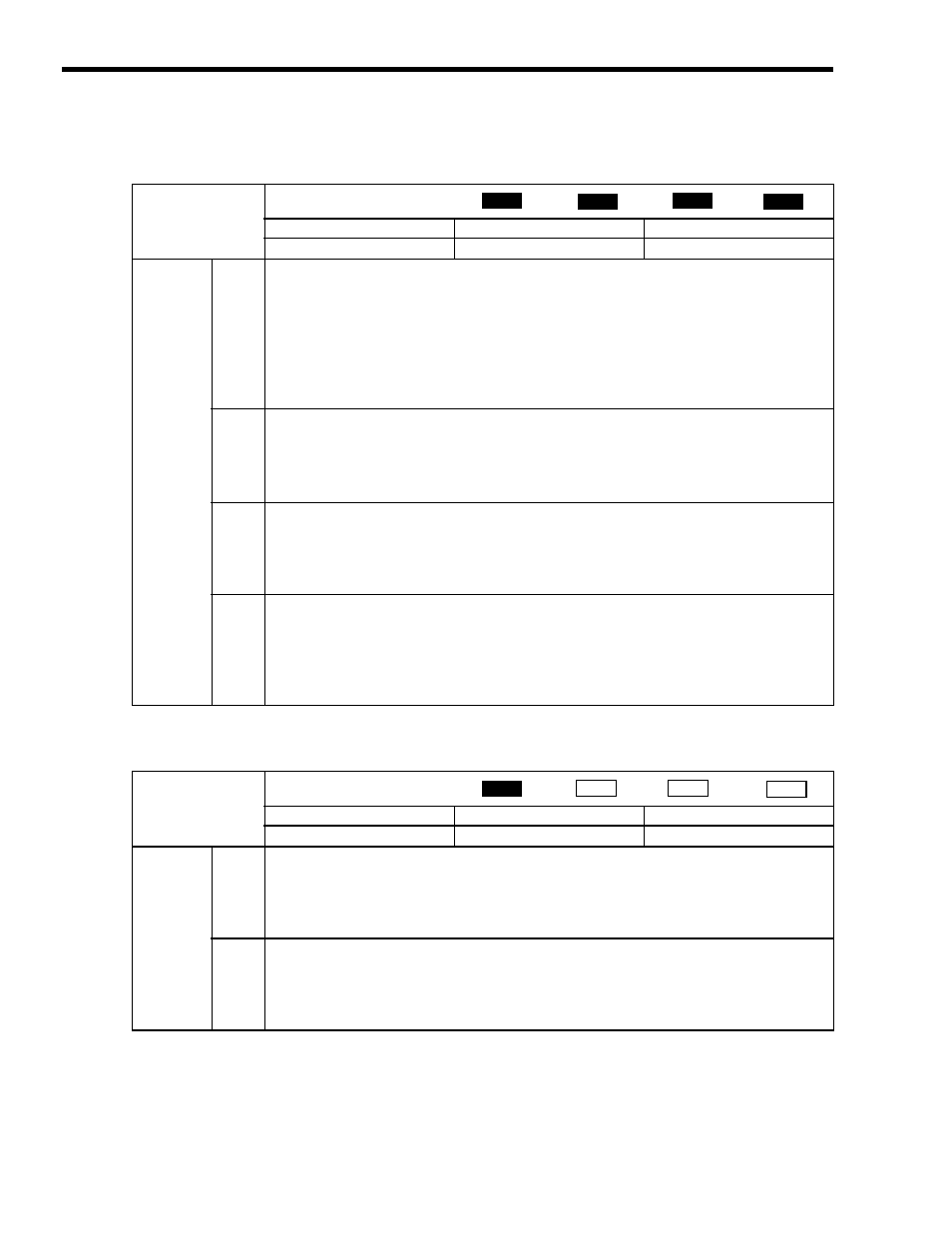
( 3 ) Function 1
( 4 ) Function 2
OW03
Function 1
Setting Range
Setting Unit
Default Value
Bit Setting
−
0011 Hex
OW03
Bit 0 to
Bit 3
Speed Units
Set the units for speed references.
0: Reference unit/s
1: 10
n
reference unit/min (default)
2: 0.01%
3: 0.0001%
(
Note) This parameter expresses the resolution of the speed reference, it does not
ensure the precision of the speed.
Bit 4 to
Bit 7
Acceleration/Deceleration Units
Set whether to specify acceleration/deceleration rates or acceleration/deceleration time constants for
acceleration/deceleration commands.
0: Reference unit/s
2
1: ms (default)
Bit 8 to
Bit B
Filter Type
Set the acceleration/deceleration filter type.
0: No filter (default)
1: Exponential acceleration/deceleration filter
2: Moving average filter
Bit C to
Bit F
Torque Unit Selection
Set the units for torque references as a percentage of the rated torque.
0: 0.01% (default)
1: 0.0001%
(
Note) This parameter expresses the resolution of the torque reference, it does not
ensure the precision of the torque.
Position
Phase
Speed
Torque
OW04
Function 2
Setting Range
Setting Unit
Default Value
Bit Setting
−
0000 Hex
OW04
Bit 0 to
Bit 3
Latch Input Signal Type
Set the latch signal type.
0: DI_5 (DEC/EXT) (default)
1: DI_2 (ZERO/HOME LS)
2: Phase-C pulse input signal
Bit 4 to
Bit 7
External Positioning Signal
Set the external signal for external positioning.
0: DI_5 (DEC/EXT) (default)
1: DI_2 (ZERO/HOME LS)
2: Phase-C pulse input signal
Position
Phase
Speed
Torque