2 ) function lists – Yaskawa MP2200 Machine Controller User Manual
Page 62
2 Module Specifications and Connections
2.2.1 General Specifications
2-16
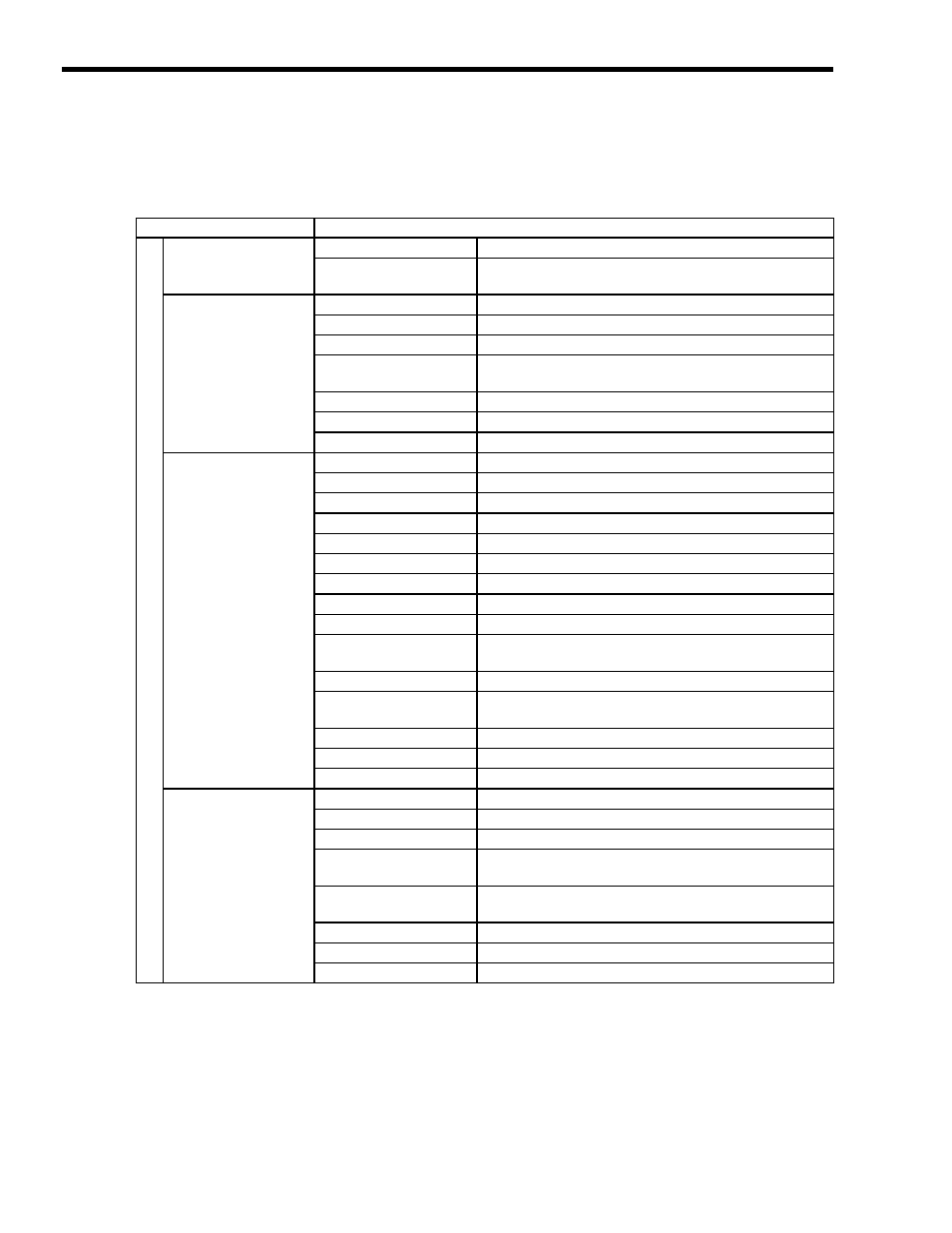
( 2 ) Function Lists
The following table provides a list of motion control functions for SVA-01 Module.
Item
Details
Co
nt
ro
l fu
nct
ion
s
Torque Reference
(Open Loop)
Torque Reference
According to the torque unit selection parameter.
Speed Limit at Torque
Reference
Rated speed percentage designation [0.01%]
Speed Reference
(Open Loop)
Speed Reference
According to the speed unit selection parameter.
Acceleration
According to the acceleration unit selection parameter.
Deceleration
According to the acceleration unit selection parameter.
Moving Average Filter
Time Constant Setting
ms
Torque Limits
According to the torque unit selection parameter.
Positive Speed Limit
Rated speed percentage designation [0.01%]
Negative Speed Limit
Rated speed percentage designation [0.01%]
Position Control
Position References
mm, inch, deg, pulse
Speed References
According to the speed unit selection parameter.
Acceleration
According to the acceleration unit selection parameter.
Deceleration
According to the acceleration unit selection parameter.
Filter Type
Moving average or exponential acceleration/deceleration
Filter Time Constant
ms
Position Compensation
mm, inch, deg, pulse
Speed Compensation
According to the speed unit selection parameter.
Position Loop Gain
1/s
Position Loop Integration
Time Constant
ms
Speed Feed Forward Gain
Position derivative percentage designation [0.01%]
Primary Delay Time
Constant
ms
Torque Limit
Rated torque percentage designation [0.01%]
Positive Speed Limit
Rated speed percentage designation [0.01%]
Negative Speed Limit
Rated speed percentage designation [0.01%]
Phase Control
Speed References
According to the speed unit selection parameter.
Speed Compensation
According to the speed unit selection parameter.
Phase Compensation
mm, inch, deg, pulse
Phase Control Proportional
Gain
Same as position loop gain parameter.
Phase Control Integral Time
Constant
Same as position loop integral time constant parameter.
Torque Limit
Rated torque percentage designation [0.01%]
Positive Speed Limit
Rated speed percentage designation [0.01%]
Negative Speed Limit
Rated speed percentage designation [0.01%]