Yaskawa MP2200 Machine Controller User Manual
Page 153
4.3 SVB-01 Module Parameter Details
4-33
( 15 ) Position Reference Setting
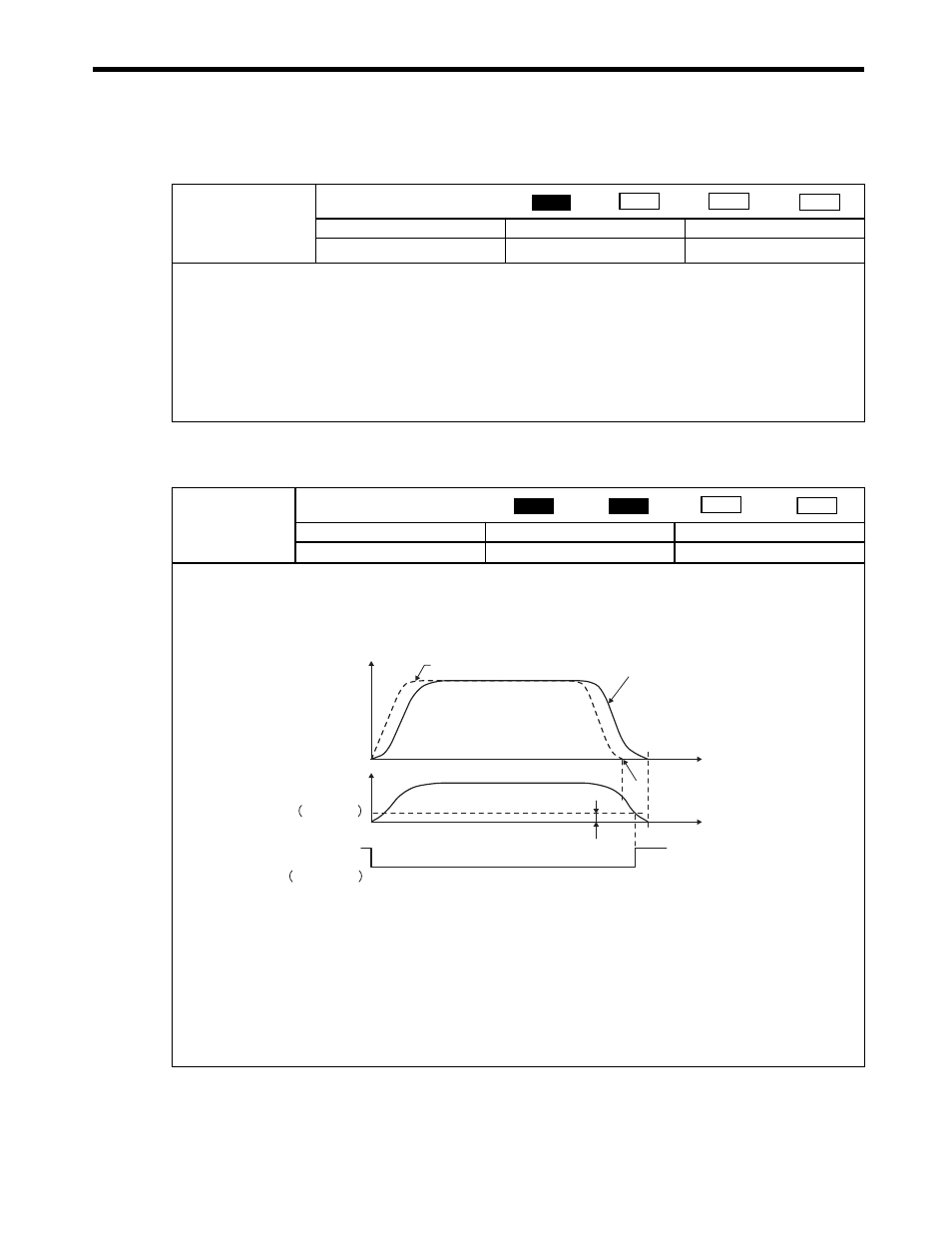
( 16 ) Positioning Completed Width
OL1C
Position Reference Setting
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Reference unit
0
Set the position reference.
This parameter is used by the following commands.
1: POSING
Positioning
2: EX_POSING
External Positioning
4: INTERPOLATE
Interpolation
6: LATCH
Latch
■
Related Parameters
OW09.Bit 5
Position Reference Type
Position
Phase
Speed
Torque
OL1E
Positioning Completed Width
Setting Range
Setting Unit
Default Value
0 to 65535
Reference unit
100
This bit shows the set value of a SERVOPACK parameter. Refer to 9.4 Parameters That Are Automatically Updated for details.
When the Positioning Completed Signal (IB2C7) turns ON after position reference distribution has completed for position
control, the Positioning Completed Signal (IB0C1) turns ON.
Set values that are suitable for all machines in the system. If the value is too small, a long time will be required for positioning to
complete.
■
Related Parameters
Fixed Parameter 4 Command Unit
Fixed Parameter 5 Number of Decimal Places
Fixed Parameter 6 Command Units per Revolution
Fixed Parameter 8 Gear Ratio [MOTOR]
Fixed Parameter 9 Gear Ratio [LOAD]
OW2E
Position Loop Gain
IB0C0
Distribution Completed (DEN)
IB0C1
Positioning Completed (POSCOMP)
Position
Phase
Speed
Torque
IL
1A
IB
0C1
OL
1E
Speed
Position Error
Reference
Motor speed
Distribution completed
Positioning
Completed Signal