3 ) automatically setting motion parameters – Yaskawa MP2200 Machine Controller User Manual
Page 82
3 Motion Module Setup
3.1.2 Self-configuration
3-10
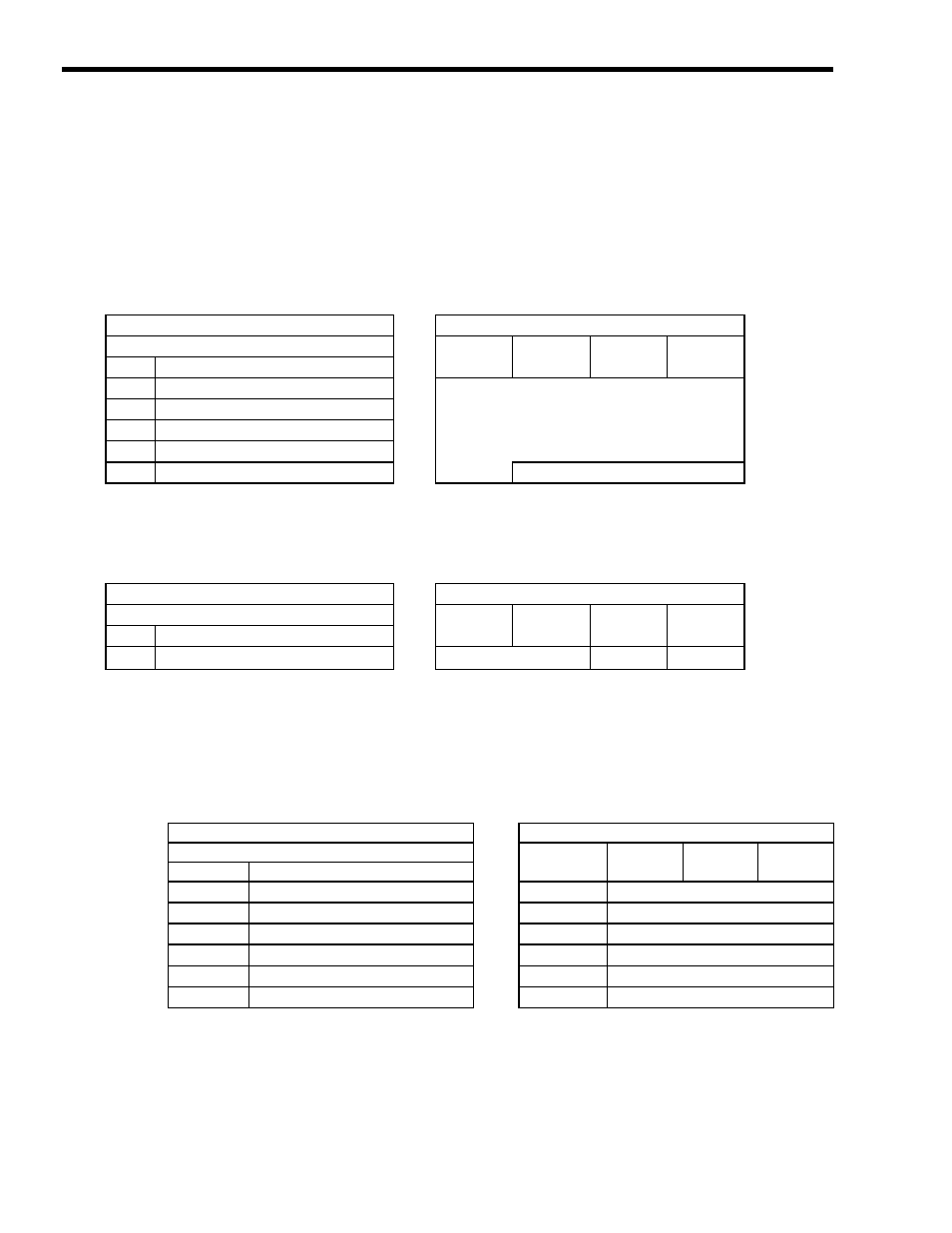
( 3 ) Automatically Setting Motion Parameters
The motion parameters for each axis are set using self-configuration as shown below.
For details on motion parameters, refer to Chapter 4 Motion Parameters.
[ a ] Motion Fixed Parameters
Motion fixed parameters and SERVOPACK parameters are automatically set as follows:
■
SERVOPACK to SVB-01 Module
(Note)1. The above processing is not performed when the axis has been set.
2. The default settings are used for all those parameters not included in the
above list.
■
SVB-01 Module to SERVOPACK
(Note)1. The default settings are written if the axis is not set.
2. The above parameters are written to the SERVOPACK’s RAM.
[ b ] Motion Setting Parameters
Motion setting parameters and SERVOPACK parameters are automatically set as follows:
■
SERVOPACK to SVB-01 Module
(Note)1. The above processing is not performed when the axis has been set.
2. The default settings are used for all those parameters not included above.
SVB-01 Module
SERVOPACK
Fixed Parameters
SGD-N,
SGDB-N
SGDH+
NS100
SGDH+
NS115
SGDS
No.
Name
29
Motor Type
←
Depends on the specifications of the connected
Servomotor.
30
Encoder Type
←
34
Rated Speed
←
36
Encoder Resolution
←
38
Max. Revolution of Absolute Encoder
←
Pn205
SVB-01 Module
SERVOPACK
Fixed Parameters
SGD-N,
SGDB-N
SGDH+
NS100
SGDH+
NS115
SGDS
No.
Name
16
Backlash Compensation
→
−
Pn81B
Pn214
SVB-01 Module
SERVOPACK
Setting Parameters
SGD-N,
SGDB-N
SGDH+
NS100
SGDH+
NS115
SGDS
Address
Name
OW2E
Position Loop Gain
←
Cn-001A
Pn102
OW2F
Speed Loop Gain
←
Cn-0004
Pn100
OW30
Speed Feed Forward Compensation
←
Cn-001D
Pn109
OW32
Position Integration Time Constant
←
−
Pn11F
OW34
Speed Integration Time Constant
←
Cn-0005
Pn101
OW3A
S-curve Acceleration Time
←
Cn-0026
Pn812