4 servo parameter settings, 4 servo parameter s, 4 servo parameter settings -36 – Yaskawa MP2200 Machine Controller User Manual
Page 108: 1 ) servopack parameter settings, Important
3 Motion Module Setup
3.2.4 Servo Parameter Settings
3-36
[ d ] Saving, Deleting, and Closing the SVB Motion Parameters
Refer to ( 2 ) Module Configuration Definition Settings under 3.1.3 Module Configuration Defini-
tions.
The Delete operation deletes the motion fixed parameter and setting parameter settings of all
axes.
The edited motion fixed parameters cannot be saved if the Servo ON signal is ON. Save the
motion fixed parameters data after this signal has gone OFF.
3.2.4 Servo Parameter Settings
( 1 ) SERVOPACK Parameter Settings
The SERVOPACK parameters must be set as described in this section when using a SERVOPACK
in combination with an SVA-01 Module.
[ a ] SGDA SERVOPACK Parameter Settings
* Both CN-01, bit B and Cn-02, bit F cannot be turned ON. If they are both turned ON, Cn-01,
bit F takes priority. If Cn-01, bit F is set to 1, the value of OL14 (Positive Side Limiting
Torque Setting at Speed Reference) will be treated as the torque feed forward.
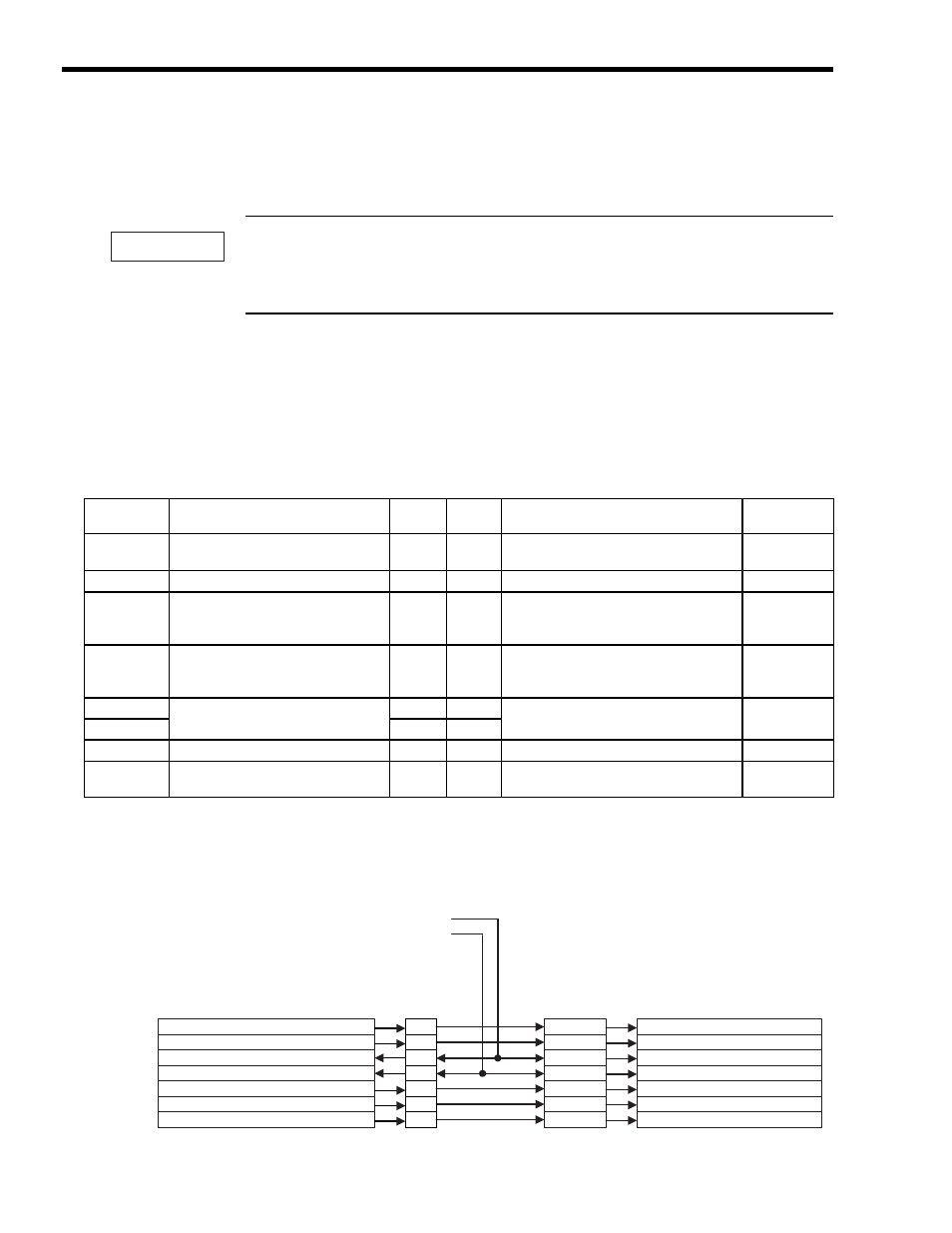
The I/O signals related to the SVA-01 are shown in the following connection diagram.
IMPORTANT
Parameter
No.
Name
Default
Value
Set
Value
Setting Contents
Remarks
Cn-01, bit 0
Servo ON input (/S-ON) enable/
disable
0
0
Enables the Servo ON input (/S-ON).
Cn-01, bit 1
SEN signal input enable/disable
0
0
Enables the SEN signal input (SEN).
Cn-01, bit 2
Forward rotation prohibited input
(P-OT) enable/disable
0
0
Enables the forward rotation prohibited
input (P-OT).
This input can
also be
disabled.
Cn-01, bit 3
Reverse rotation prohibited input
(N-OT) enable/disable
0
0
Enables the reverse rotation prohibited
input (N-OT).
This input can
also be
disabled.
Cn-01, bit A
Control mode selection
0
1
Torque control II
(Torque Control
↔ Speed Control)
Cn-01, bit B
0
1
Cn-01, bit F
Torque feed forward function
0
0
Disables the torque forward function.
*
Cn-02, bit F
Torque reference input selection
0
1
In speed control mode, TREF is used as the
torque limit.
*
/S-ON
OWxx00 bit 15: Alarm reset
Internal variable: Switch control mode.
OWxx00, bit 0: Servo ON
/ALM RST
/P-CON
OWxx5D bit 3:
General-purpose DO_3
OWxx5D bit 4:
General-purpose DO_4
SVA-01
CN1/CN2
31
30
12
14
13
IWxx58 bit 3:
General-purpose DI_3
IWxx58 bit 4:
General-purpose DI_4
N-OT/general-purpose input
15
33
P-OT
N-OT
14
18
15
12
11
16
17
P-OT/general-purpose input
SGDA
CN1
SVA-01
Setting/Monitoring Parameters
SGDA
Input Signals
/N-CL
/P-CL