6 stepping motors, 1 stepping motors - overview, 2 stepping motor – Metrohm viva 1.1 (ProLab) User Manual
Page 999: Stepping motors
■■■■■■■■■■■■■■■■■■■■■■
8 Manual control
viva 1.1 (for process analysis)
■■■■■■■■
987
8.4.6.6
Stepping motors
8.4.6.6.1
Stepping motors - Overview
Program part: Manual control
If the Stepping motors branch is selected in the device list, then all step-
ping motors can be commonly controlled in the Functions/Parameters
subwindow. The status for all connected stepping motors is displayed in
their physical order in the subwindow for the graphical display.
Switch on/off
[Start]
Sets all stepping motors to ACTIVE.
[Stop]
Sets all stepping motors to INACTIVE.
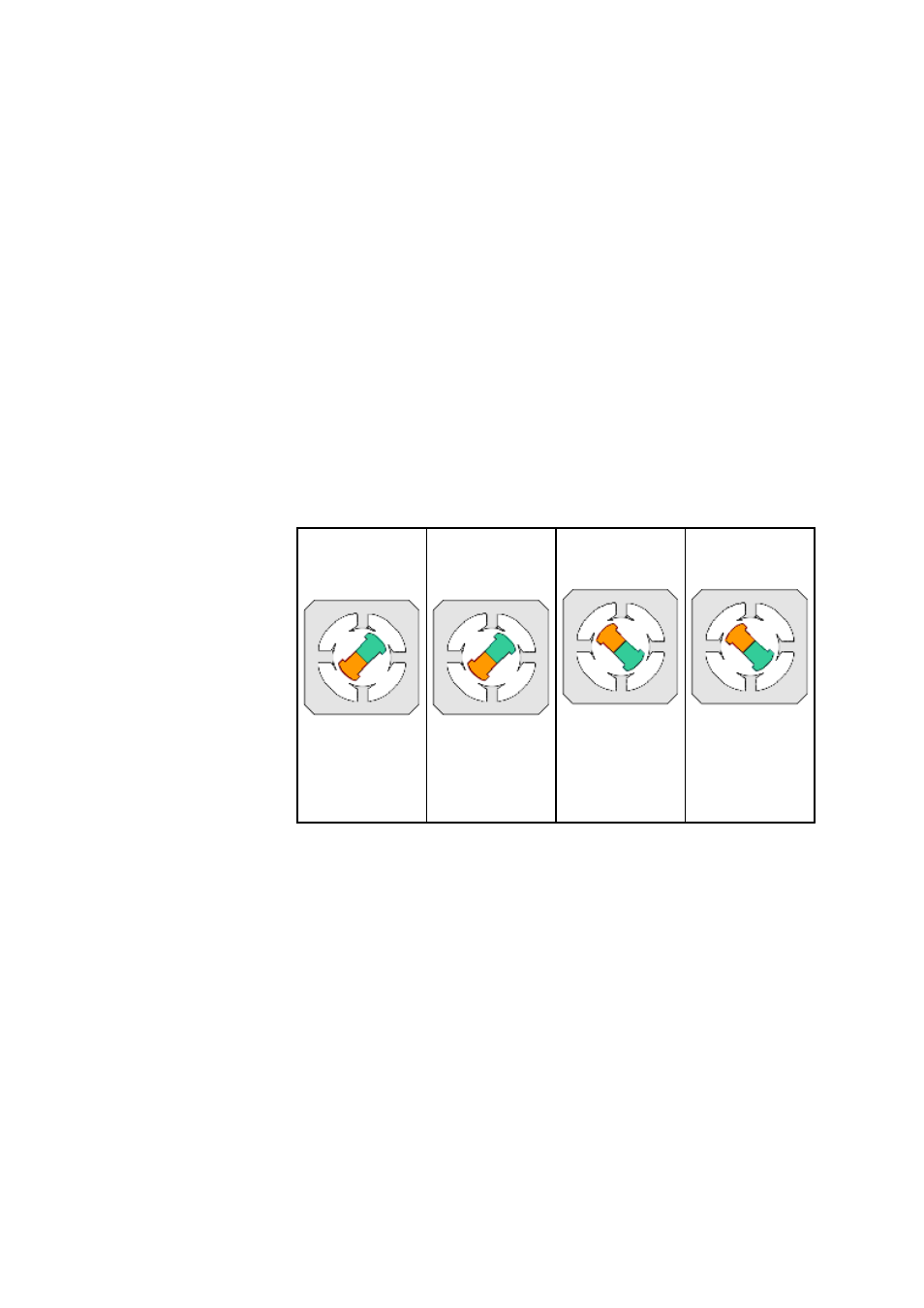
Graphical display
Example:
Dig-
Out_2_3_1
Type: linear
drive
Status: ACTIVE
Dig-
Out_2_3_2
Type: rotary
drive
Status: ACTIVE
Dig-
Out_2_3_3
Type: rotary
drive
Status: INAC-
TIVE
Dig-
Out_2_3_4
Type: linear
drive
Status: INAC-
TIVE
8.4.6.6.2
Stepping motor
Program part: Manual control
If a single stepping motor is selected in the device list, then the stepping
motor can be controlled in the subwindow for functions/parameters on
the Relative position, End position, Absolute position, Reference
position and Reset tabs.
The status of the stepping motor and the assigned ports is displayed in the
subwindow for the graphical display.
Relative position
The position of the stepping motor can be modified relative to the current
position by a defined value on this tab.