Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 89
4.3 Motion Parameter Lists
4.3.2 Setting Parameter List
4-13
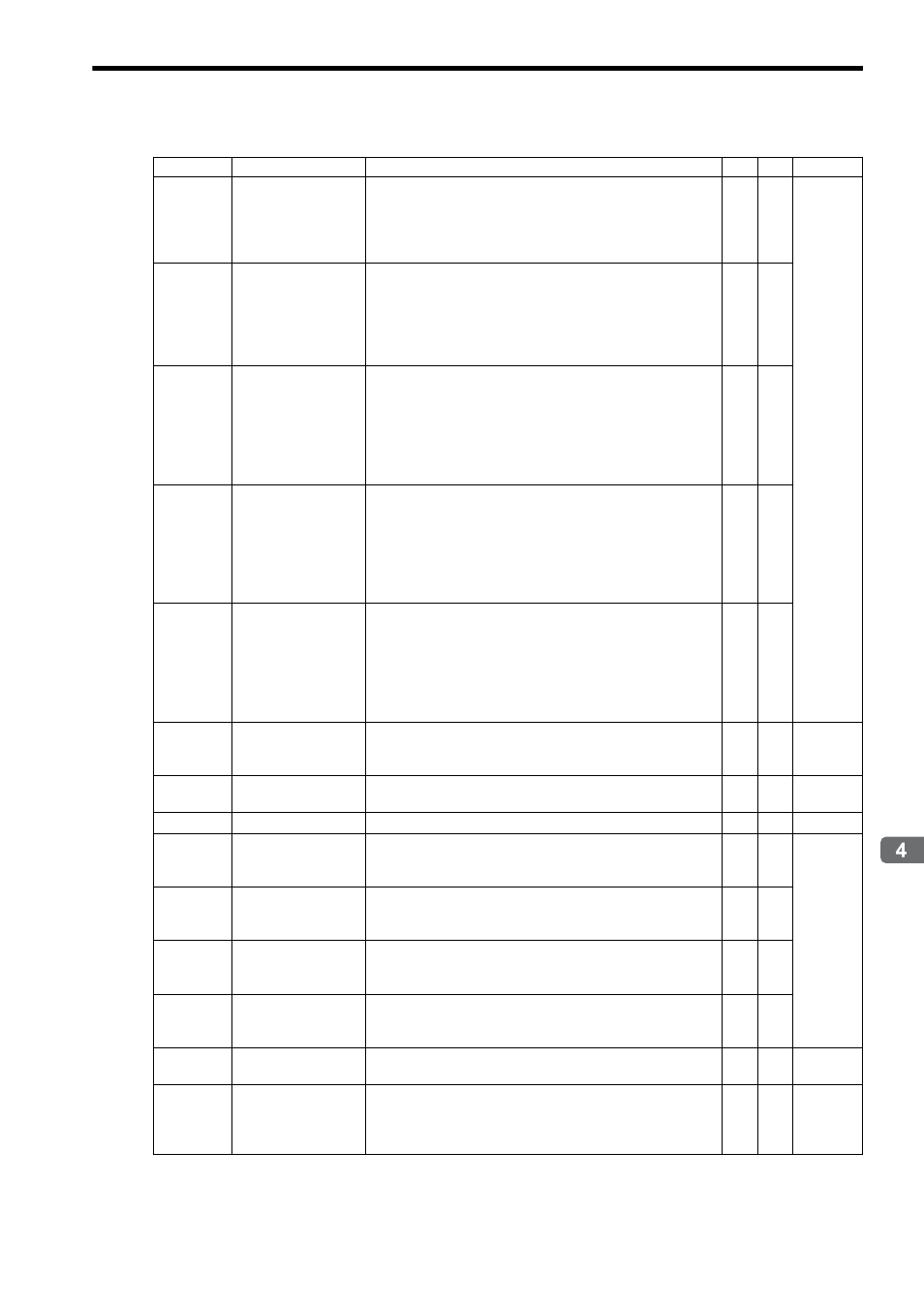
Motion Parameters
OW
51
Servo Driver User
Constant Size
(SERVOPACK
parameter size for
motion command)
Set the number of words in the SERVOPACK parameter.
Yes
−
4.4.2 ( 30 )
OL
52
Servo Driver User
Constant Set Point
(SERVOPACK
parameter setting
value for motion
command
Set the setting for the SERVOPACK parameter.
Yes
−
OW
54
Servo Driver for
Assistance User
Constant No.
(SERVOPACK
parameter No.for
motion
subcommand)
Set the number of the SERVOPACK parameter number.
Yes
−
OW
55
Servo Driver for
Assistance User
Constant Size
(SERVOPACK
parameter size for
motion
subcommand)
Set the number of words in the SERVOPACK parameter.
Yes
−
OL
56
Servo Driver for
Assistance User
Constant Set Point
(SERVOPACK
parameter setting
value for motion
subcommand)
Set the setting for the SERVOPACK parameter.
Yes
−
OW
58
to
OW
5B
−
Reserved for system use.
−
−
−
OW
5C
Fixed Parameter
Number
Set the number of the fixed parameter to read with the
FIXPRM_RD motion subcommand.
Yes
Yes 4.4.2 ( 31 )
OW
5D
−
Reserved for system use.
−
−
−
OL
5E
Encoder Position
When Power is OFF
(Lower 2 words)
1 = 1 pulse
For linear type, do not set this register.
Yes
−
4.4.2 ( 32 )
OL
60
Encoder Position
When Power is OFF
(Upper 2 words)
1 = 1 pulse
For linear type, do not set this register.
Yes
−
OL
62
Pulse Position When
Power is OFF
(Lower 2 words)
1 = 1 pulse
For linear type, do not set this register.
Yes
−
OL
64
Pulse Position When
Power is OFF (Up-
per 2 words)
1 = 1 pulse
For linear type, do not set this register.
Yes
−
OL
66 to
OL
6E
−
Reserved for system use.
−
−
−
OW
70
to
OW
7F
Command Buffer for
Servo Driver
Transmission
Reference Mode
This area is used for command data when MECHATROLINK
servo commands are specified directly.
Yes
−
4.4.2 ( 33 )
(cont’d)
Register No.
Name
Contents
SVB SVR Reference