3 ) related parameters – Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 240
6.2 Motion Command Details
6.2.21 Absolute Encoder Reset (ABS_RST)
6-79
Motion Commands
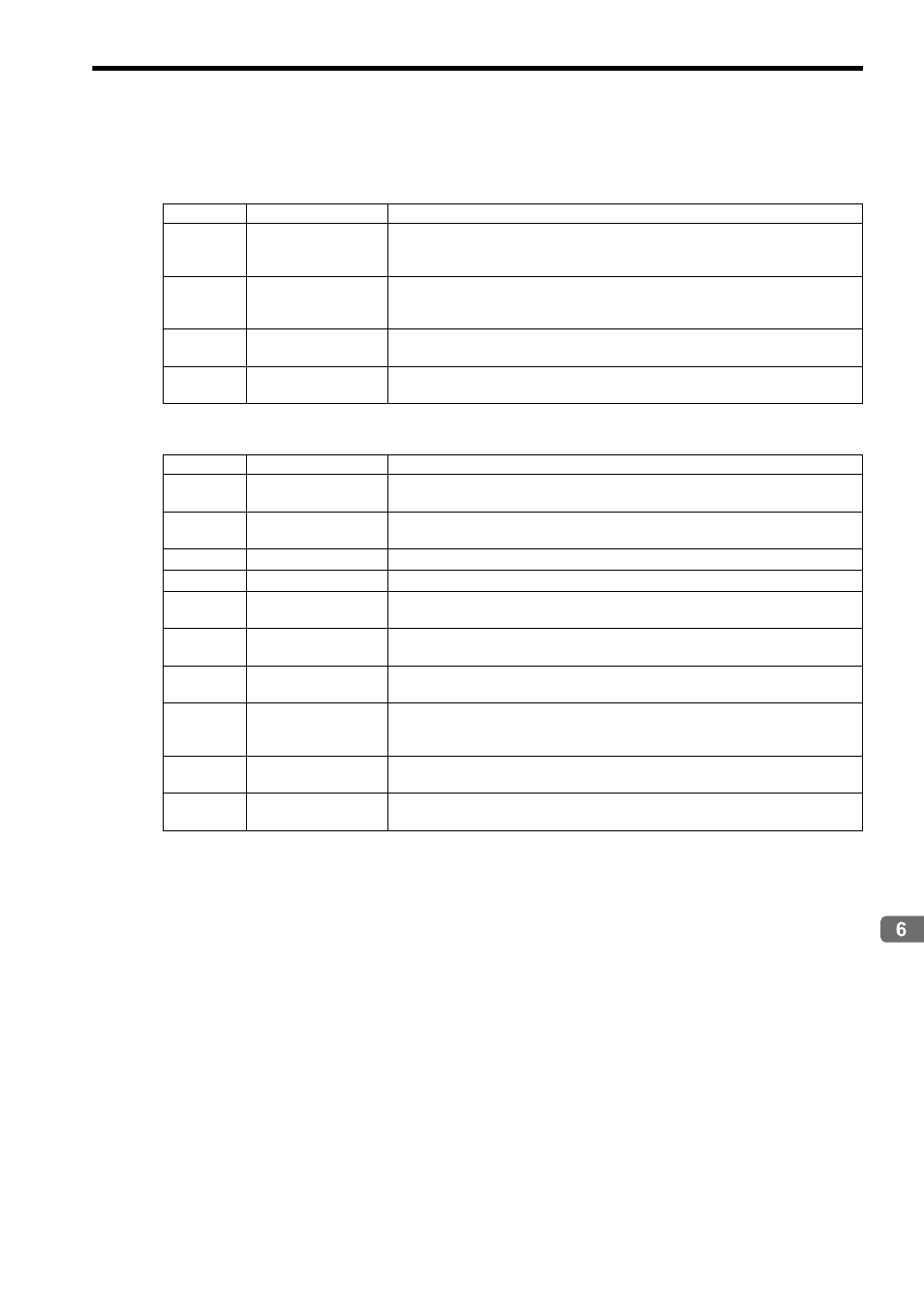
( 3 ) Related Parameters
[ a ] Setting Parameters
[ b ] Monitoring Parameters
Parameter
Name
Setting
OW
00
Bit 0
Servo ON
Turn the power to the Servomotor ON and OFF.
1: Power ON to Servomotor; 0: Power OFF to Servomotor
Turn OFF the power before setting the Motion Command (OW
08) to 22.
OW
08
Motion Command
Starts resetting the absolute encoder when this parameter is set to 22.
Even if this parameter is set to 0 during command processing, it will be ignored and
execution will be continued.
OW
09
Bit 0
Holds a Command
This parameter is ignored for the ABS_RST command.
OW
09
Bit 1
Interrupt a Command
This parameter is ignored for the ABS_RST command.
Parameter
Name
Monitor Contents
IW
00
Bit 0
Motion Controller
Operation Ready
Indicates the communication status between the Machine Controller and SERVOPACK.
1: Communication synchronized, 0: Communication disconnected
IW
00
Bit 1
Servo ON
Indicates the Servo ON status.
1: Power supplied to Servomotor, 0: Power not supplied to Servomotor
IL
02
Warning
Stores the most current warning.
IL
04
Alarm
Stores the most current alarm.
IW
08
Motion Command
Response Code
Indicates the motion command that is being executed.
The response code will be 22 during ABS_RST command execution.
IW
09
Bit 0
Command Execution
Flag
Turns ON during ABS_RST command execution and turns OFF when execution has
been completed.
IW
09
Bit 1
Command Hold
Completed
Always OFF for the ABS_RST command.
IW
09
Bit 3
Command Error
Completed Status
Turns ON if an error, such as a communication error, occurs during ABS_RST com-
mand execution.
Command execution will be canceled.
IW
09
Bit 7
Absolute Encoder
Reset Completed
Turns ON when resetting the absolute encoder has been completed.
IW
09
Bit 8
Command Execution
Completed
Turns ON when ABS_RST command execution has been completed.