Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 111
4.4 MP2000 Series Machine Controller Parameter Details
4.4.2 Motion Setting Parameter Details
4-35
Motion Parameters
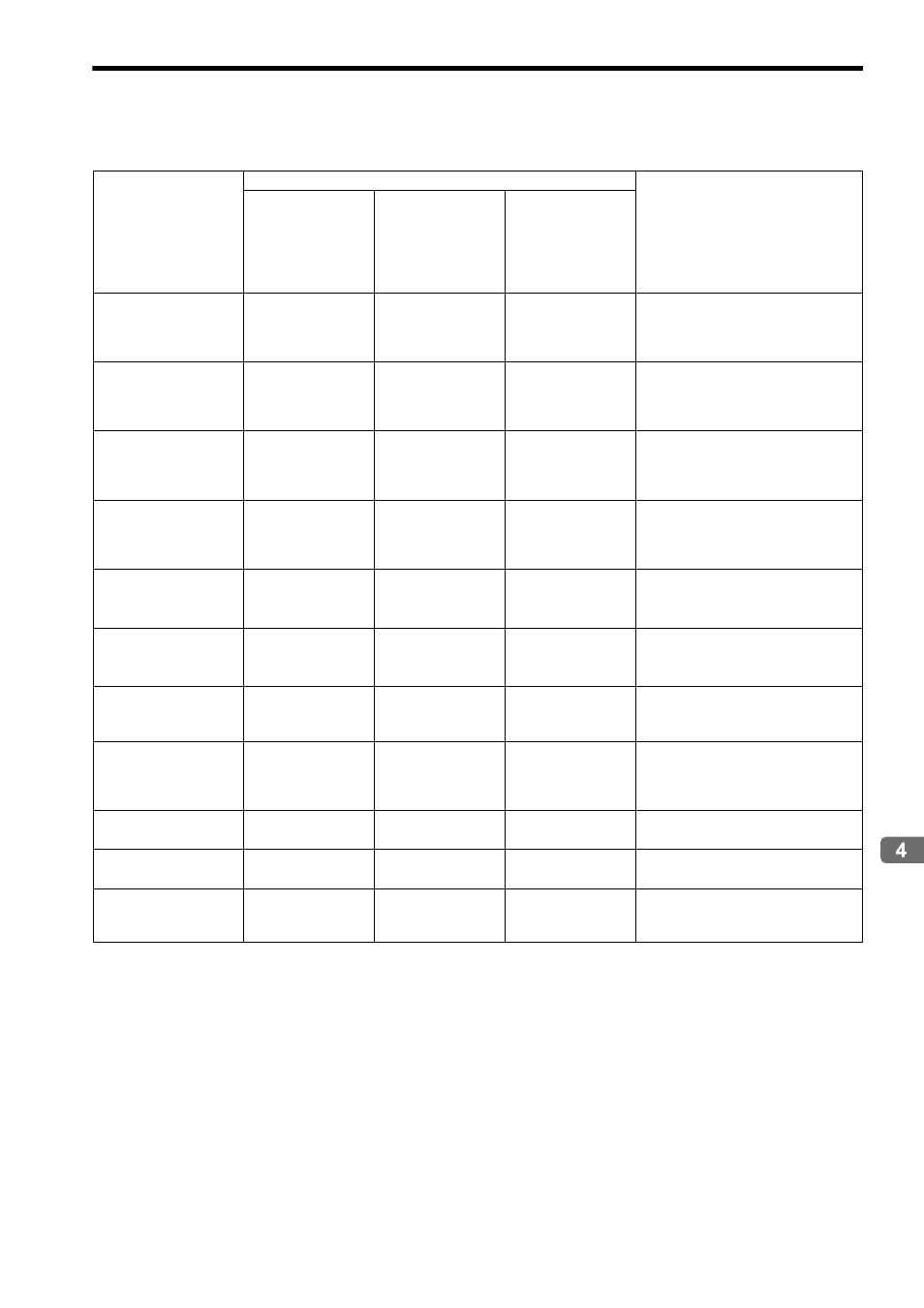
[ a ] SERVOPACKs with Stop Mode Selection (OW
02, bit 8 to F)
* 1. Available for SERVOPACKs with MECHATROLINK Communications interface version 0011 or later.
* 2. This product’s stopping modes differ from those of other SERVOPACKs.
: Available,
×
: Not available
When a move command other than the speed reference (VELO) is executed and the stop mode is changed, the tim-
ing in which the setting is enabled will vary depending on the SERVOPACK being used.
SERVOPACK
Stop Mode Selections
Remarks
0: Decelerate to a
stop according to
the linear deceler-
ation time con-
stant
1: Stop immediately
2: Stop in accor-
dance with the
value of Linear
Deceleration Con-
stant 1 for Stop-
ping
SGD-
N
×
×
When setting 1 or 2 is unavailable, the
default setting (0) will be used and the
motor will stop in accordance with the
specified for the 0 setting.
SGDB-
AN
×
×
When setting 1 or 2 is unavailable, the
default setting (0) will be used and the
motor will stop in accordance with the
specified for the 0 setting.
SGDH-
E+NS100
×
×
When setting 1 or 2 is unavailable, the
default setting (0) will be used and the
motor will stop in accordance with the
specified for the 0 setting.
SGDH-
E+NS115
×
When setting 1 or 2 is unavailable, the
default setting (0) will be used and the
motor will stop in accordance with the
specified for the 0 setting.
SGDS-
12
*1
(SERVOPACK
Parameter: Pn827)
–
SGDS-
15
*1
(SERVOPACK
Parameter: Pn827)
–
SGDX-
12
(SERVOPACK
Parameter: Pn827)
–
SJDE-
AN
×
When setting 1 or 2 is unavailable, the
default setting (0) will be used and the
motor will stop in accordance with the
specified for the 0 setting.
SGDV-
11
(Pn827)
–
SGDV-
15
(Pn827)
–
MECHATROLINK-II
Compatible Stepping
Motor Driver
*2
*2
*2
–