6 ) bit 6: positioning time over, 7 ) bit 7: excessive positioning moving amount – Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 478
12.5 Troubleshooting Motion Errors
12.5.2 Motion Error Details and Corrections
12-35
Troubleshooting
( 6 ) Bit 6: Positioning Time Over
The above check is not performed if the Positioning Completion Check Time (OW
26) is set to 0.
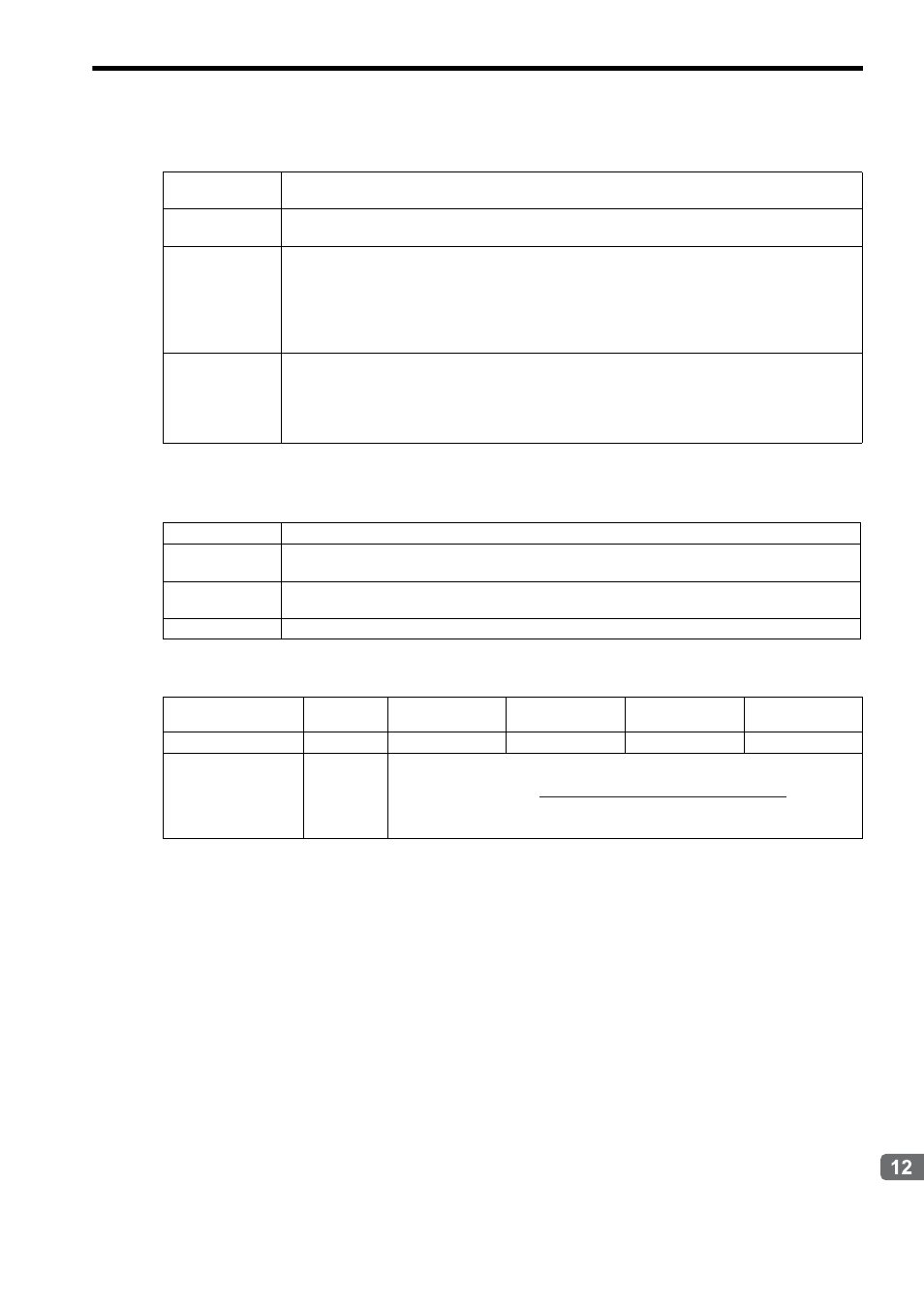
( 7 ) Bit 7: Excessive Positioning Moving Amount
The limit on the positioning travel distance is determined as follows depending on the setting for fixed parameter No.4
“Reference Unit Selection”.
Detection Timing
• Positioning was not completed within the time specified in OW
26 (Positioning Completion Check
Time) after completing pulse distribution.
Processing when
Alarm Occurs
• The current command was ended forcibly.
• The Command Error Completed Status in the Motion Command Status (IW
0,9 bit 3) will turn ON.
Error and Cause
One of the following is possible.
• The position loop gain and speed loop gain are not set correctly, creating poor response. Or, there is oscil-
lation.
• The Positioning Completion Check Time (OW
26) is too short.
• The capacity of the motor is insufficient for the machine load.
• Connections are not correct between the SERVOPACK and the motor.
Correction
Check the following.
• Check the SERVOPACK gain parameters.
• Check connections between the SERVOPACK and the motor.
• Check the motor capacity.
• Check the Positioning Completion Check Time (OW
26).
Detection Timing
• Positioning command is executed.
Processing when
Alarm Occurs
• The move command is not executed.
• The Command Error Completed Status in the Motion Command Status (IW
09, bit 3) will turn ON.
Error and Cause
• A move command (commands for positioning, external positioning, or STEP operation) was executed that
exceeded the limit of the positioning moving amount.
Correction
• Check the moving amount for the axis being positioned.
Setting of fixed
parameter No.4
0
1
2
3
4
Reference unit
pulse
mm
deg
inch
μm
Limit on the position-
ing travel distance
2147483647
2147483647
×
No.36: Number of Pulses per Motor Rotation ×
No.8: Servo Motor Gear Ratio
No.6: Travel Distance per Machine Rotation
×
No.9: Machine Gear Ratio