I.4 mechatrolink commands that cannot be used, A-40 – Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 529
Appendix I Servo Driver Transmission Reference Mode
I.3 Motion Parameters That Can be Used in Servo Driver Transmission Reference Mode
A-40
I.3
Motion Parameters That Can be Used in Servo Driver Transmission Reference
Mode
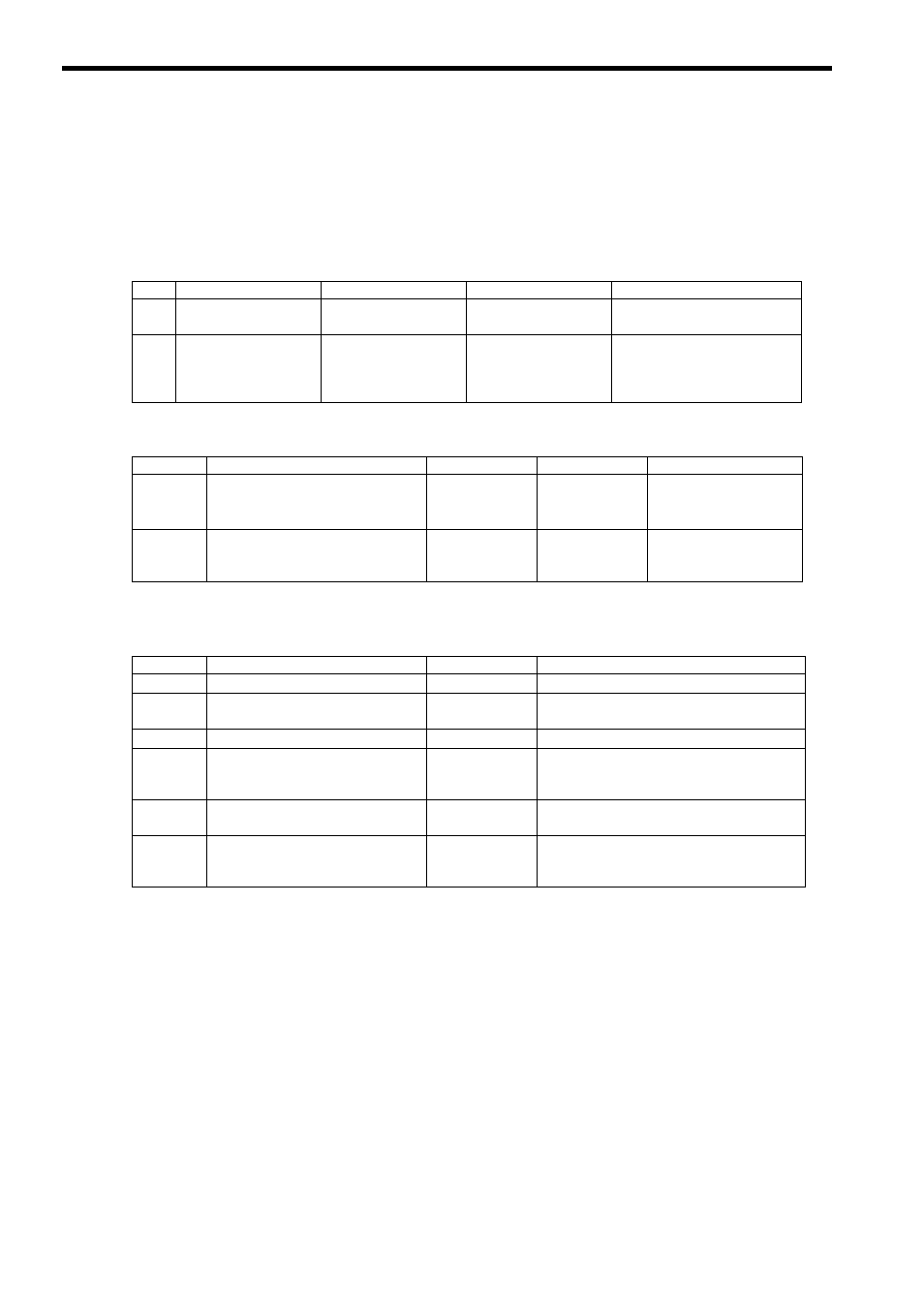
The motion parameters that can be used in transparent command mode are limited to those listed below. Motion Com-
mands other than those listed below cannot be used.
Motion Fixed Parameters
Motion Setting Parameters
* For SVB-01 Module version 1.20 or later or built-in SVB Module version 2.50 or later
Motion Monitoring Parameters
I.4
MECHATROLINK Commands That Cannot Be Used
Do not use the following MECHATROLINK commands unless it is absolutely necessary, since connection manage-
ment is carried out by the system.
• Connection request command (CONNECT)
• Disconnection request command (DISCONNECT)
• Synchronization request command (SYNC_SET)
• Device setup request command (CONFIG)
• Sensor ON command (SENS_ON)
• Sensor OFF command (SENS_OFF)
No.
Name
Setting Range
Default Setting
Description
1
Function Selection
Flag 1
Bit setting
0
Bit 8: Interpolation Segment dis-
tribution Processing
2
Function Selection
Flag 2
Bit setting
0
Bit 0: Communication Abnor-
mality Detection Mask
Bit 1: WDT Abnormality
Detection Mask
Register
Name
Setting Range
Default Setting
Description
OW
00 Run Command Setting
Bit setting
0
Bit 14: Communication
Reset
*
Bit 15: Clear Alarm
0W
70
to
OW
7E
Command Buffer for Servo Driver
Transmission Reference Mode
0
Register
Name
Setting Range
Description
IW
00
RUN Status
Bit setting
Bit 0: Motion Controller Operation Ready
IW
01
Parameter Number When Range
Over is Generated
0 to 65535
IL
02
Warning
Bit setting
Bit 2: Fixed Parameter Error
IL
04
Alarm
Bit setting
Bit 16: Servo Driver Synchronization
Communication Error
Bit 17: Servo Driver Communication Error
IL
18
Machine Coordinate System Latch
Position (LPOS)
-2
31
to 2
31
-1
IW
70
to
IW
7E
Response Buffer for Servo Driver
Transmission Reference Mode