Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 394
10.4 Motion Parameter Details
10.4.2 Setting Parameter List
10-30
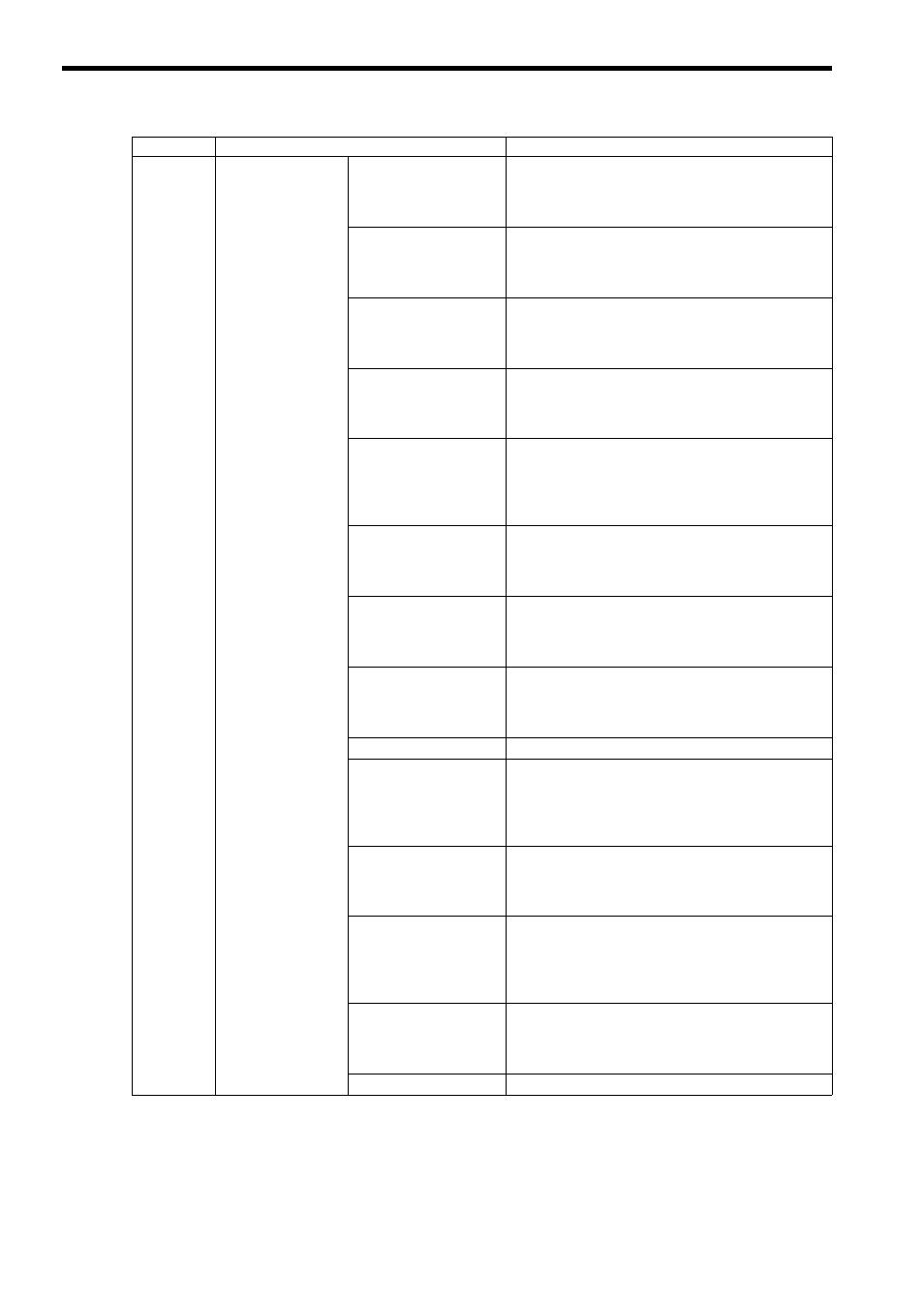
OW
0D
Input Data Option
Selection
Bit 0: Motor Speed
0: Disabled, 1: Enabled
When this bit is set to 1 (enabled), the output data option
Motor Speed (IW
13) will be monitored when the
command Inverter Drive Control is executed.
Bit 1: Torque Reference
(U1-09)
0: Disabled, 1: Enabled
When this bit is set to 1 (enabled), the output data option
Torque Reference (IW
14) will be monitored when
the command Inverter Drive Control is executed.
Bit 2: Encoder Count
0: Disabled, 1: Enabled
When this bit is set to 1 (enabled), the output data option
Encoder Count (IW
15) will be monitored when the
command Inverter Drive Control is executed.
Bit 3: Frequency
Reference (U1-01)
0: Disabled, 1: Enabled
When this bit is set to 1 (enabled), the output data option
Frequency Reference (IW
16) will be monitored
when the command Control Inverter Drive is executed.
Bit 4: Multi-function
Analog Input A2
0: Disabled, 1: Enabled
When this bit is set to 1 (enabled), the output data option
Multi-function Analog Input A2 (IW
17) will be
monitored when the command Inverter Drive Control is
executed.
Bit 5: Main Bus Voltage
0: Disabled, 1: Enabled
When this bit is set to 1 (enabled), the output data option
Main Bus Voltage (IW
18) will be monitored when
the command Inverter Drive Control is executed.
Bit 6: Alarm Code
0: Disabled, 1: Enabled
When this bit is set to 1 (enabled), the output data option
Alarm Code (IW
19) will be monitored when the
command Inverter Drive Control is executed.
Bit 7: Warning Code
0: Disabled, 1: Enabled
When this bit is set to 1 (enabled), the output data option
Alarm Code (IW
1A) will be monitored when the
command Inverter Drive Control is executed.
Bit 8
Reserved by the system
Bit 9: Multi-function
Analog Input A3
0: Disabled, 1: Enabled
When this bit is set to 1 (enabled), the output data option
Multi-function Analog Input A3 (IW
1C) will be
monitored when the command Inverter Drive Control is
executed.
Bit A: Multi-function
Input Terminal
0: Disabled, 1: Enabled
When this bit is set to 1 (enabled), the output data option
Digital Input Terminal (IW
1D) will be monitored
when the command Inverter Drive Control is executed.
Bit B: Multi-function
Analog Input A1
0: Disabled, 1: Enabled
When this bit is set to 1 (enabled), the output data option
Multi-function Analog Input A1 (IW
1E) will be
monitored when the command Inverter Drive Control is
executed.
Bit C: Encoder Counter
(ch2)
0: Disabled, 1: Enabled
When this bit is set to 1 (enabled), the output data option
Encoder Counter (ch2) (IW
1F) will be monitored
when the command Inverter Drive Control is executed.
Bits D to F
Reserved by the system
Register No.
Name
Contents