3 ) mode setting 2 – Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 110
4.4 MP2000 Series Machine Controller Parameter Details
4.4.2 Motion Setting Parameter Details
4-34
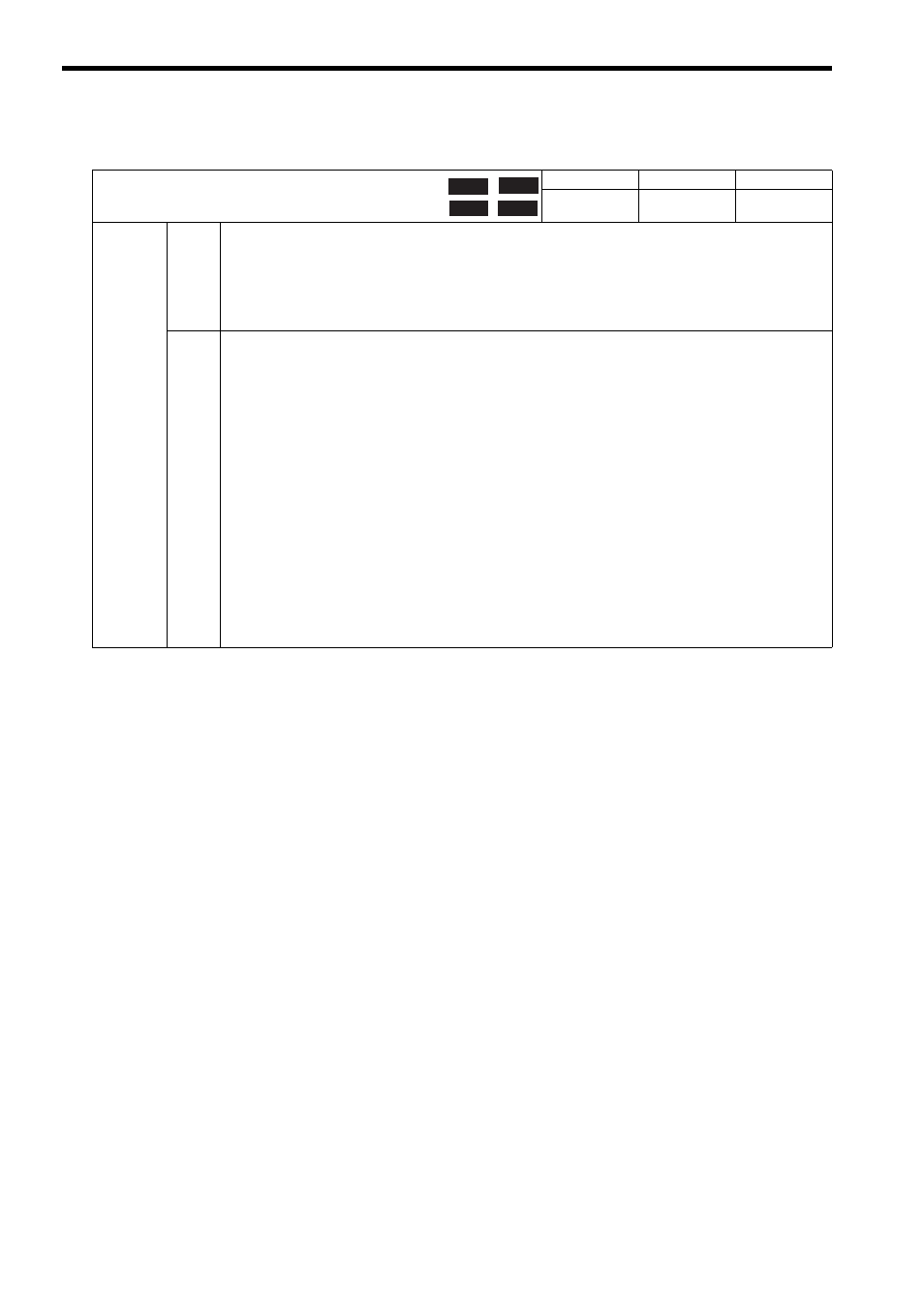
( 3 ) Mode Setting 2
OW
02
Mode Setting 2
Setting Range
Setting Unit
Default Value
−
−
0000H
Description
Bit 0
Monitor 2 Enabled
Disable/enable Monitor 2 in the Servo User Monitor Setting (setting parameter OW
4E, bits 4 to 7).
0: Disabled (default)
1: Enabled
This bit is valid only when the communication mode is MECHATROLINK-I or MECHATROLINK-II 17-byte
Mode. This bit is ignored for MECHATROLINK-II 32-byte Mode.
Bit 8 to
Bit F
Stop Mode Selection
SVB-01 modules: Available for SVB module version 1.21 or later
Built-in SVB modules: Available for SVB module version 2.60 or later
Selects the stopping method for the axes controlled by move commands.
This function is only available for MECHATROLINK compatible SERVOPACKs.
For details on functions that can be used with the SERVOPACK, refer to the section on the HOLD command in
the manual of the SERVOPACK being used.
• When using the speed reference (VELO) (OW
08 = 23)
0: Decelerate to a stop according to the linear deceleration time constant (default)
1: Stop immediately
When using the speed reference and this setting is set to a value other than 0 or 1, the motor
will stop in accordance with the action specified for the 0 setting.
• When using any move commands other than the speed reference (VELO)
0: Decelerate to a stop according to the linear deceleration time constant (default)
1: Stop immediately
2: Stop in accordance with the value of Linear Deceleration Constant 1 for Stopping*
* To use this setting, set Pn827 beforehand.
Position
Phase
Speed Torque