13 ) secondly speed compensation – Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 119
4.4 MP2000 Series Machine Controller Parameter Details
4.4.2 Motion Setting Parameter Details
4-43
Motion Parameters
Related parameters
• Setting parameters
SERVOPACK Parameter Setting
The actual torque limit is the lowest one of the values listed in a category in the following table.
For linear servomotors, the parameter numbers are different. Use Pn482 instead of Pn402 and Pn483 instead of
Pn403.
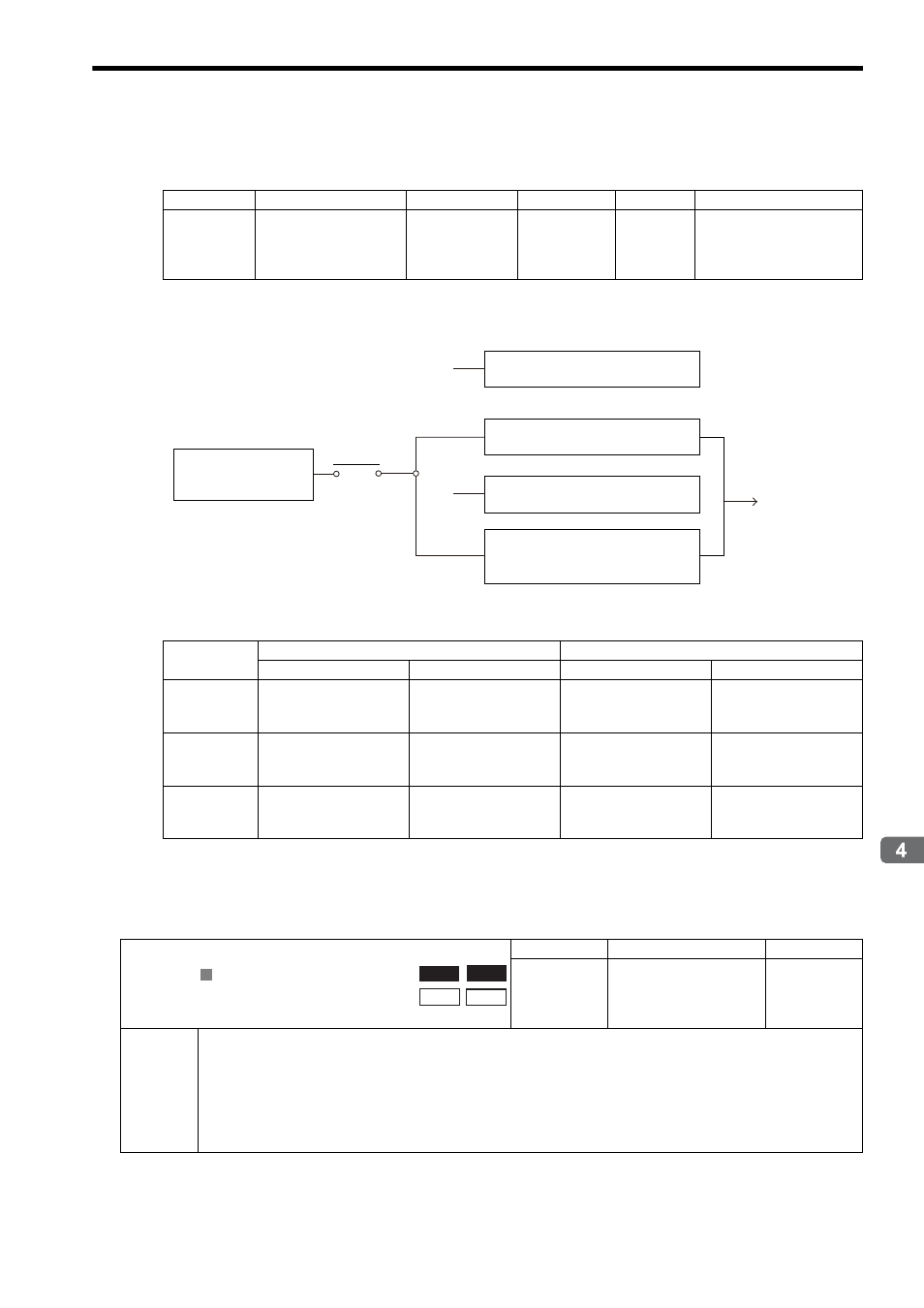
( 13 ) Secondly Speed Compensation
Register No.
Name
Setting Range
Default Value
Setting Unit
Remarks
OL
14
Positive Side Limiting
Torque/Thrust
Setting at the Speed Ref-
erence
–2
31
to 2
31
–1
30000
1 = 0.01%
or 0.0001%
To enable the setting, the
SERVOPACK parameter
also needs to be set.
Pn002 Setting
Forward Torque Limit
Reverse Torque Limit
When OPTION.P_CL = 0 When OPTION.P_CL = 1 When OPTION.N_CL = 0 When OPTION.N_CL = 1
n.
0
or
n.
2
Pn402 setting
Pn402 setting,
Pn404 setting
Pn403 setting
Pn403 setting value,
Pn405 setting value,
n.
1
Pn402 setting,
PTLIM (TLIM)
Pn402 setting,
Pn404 setting,
PTLIM (TLIM)
Pn403 setting,
NTLIM (TLIM)
Pn403 setting value,
Pn405 setting value,
NTLIM (TLIM)
n.
3
Pn402 setting
Pn402 setting,
Pn404 setting,
PTLIM (TLIM)
Pn403 setting
Pn403 setting value,
Pn405 setting value,
NTLIM (TLIM)
Positive Side Limiting
Torque/Thrust Setting
at the Speed Reference
OL
14
Torque limit input
Pn81F.1
= 2
The set value of PTLIM, NTLIM,
and TFF are ignored.
= 0
Pn002.0
= 3
= 1 PTLIM and NTLIM operate
as the torque limit values.
TFF operates as the torque feed
forward.
When P-CL and N-CL are available,
PTLIM and NTLIM operate
as the torque limit value.
OL
16
Secondly Speed Compensation
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Depends on the speed
unit set in Function Set-
ting 1 (setting parameter
OW
03, bits 0 to 3).
0
Description
Set the speed feed forward amount for the Phase Reference (PHASE), Interpolation (INTERPOLATE), and Latch
(LATCH) commands.
The setting unit for Speed Compensation (setting parameter OW
31) is 0.01% (fixed). The unit for this parameter,
however, can be selected using Speed Unit Selection.
When used at the same time as OW
31, speed compensation can be performed twice.
The setting unit for this parameter depends on the Speed Unit Selection (OW
03, bits 0 to 3), but
the result of applying the speed unit setting is not shown here.
R
Phase
Speed Torque
Position