H.5 availability when using wild card servos, A-37, 1 ) limitation in application of motion commands – Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 526
Appendix H Wild Card Servos
H.5 Availability When Using Wild Card Servos
A-37
Appendices
H.5
Availability When Using Wild Card Servos
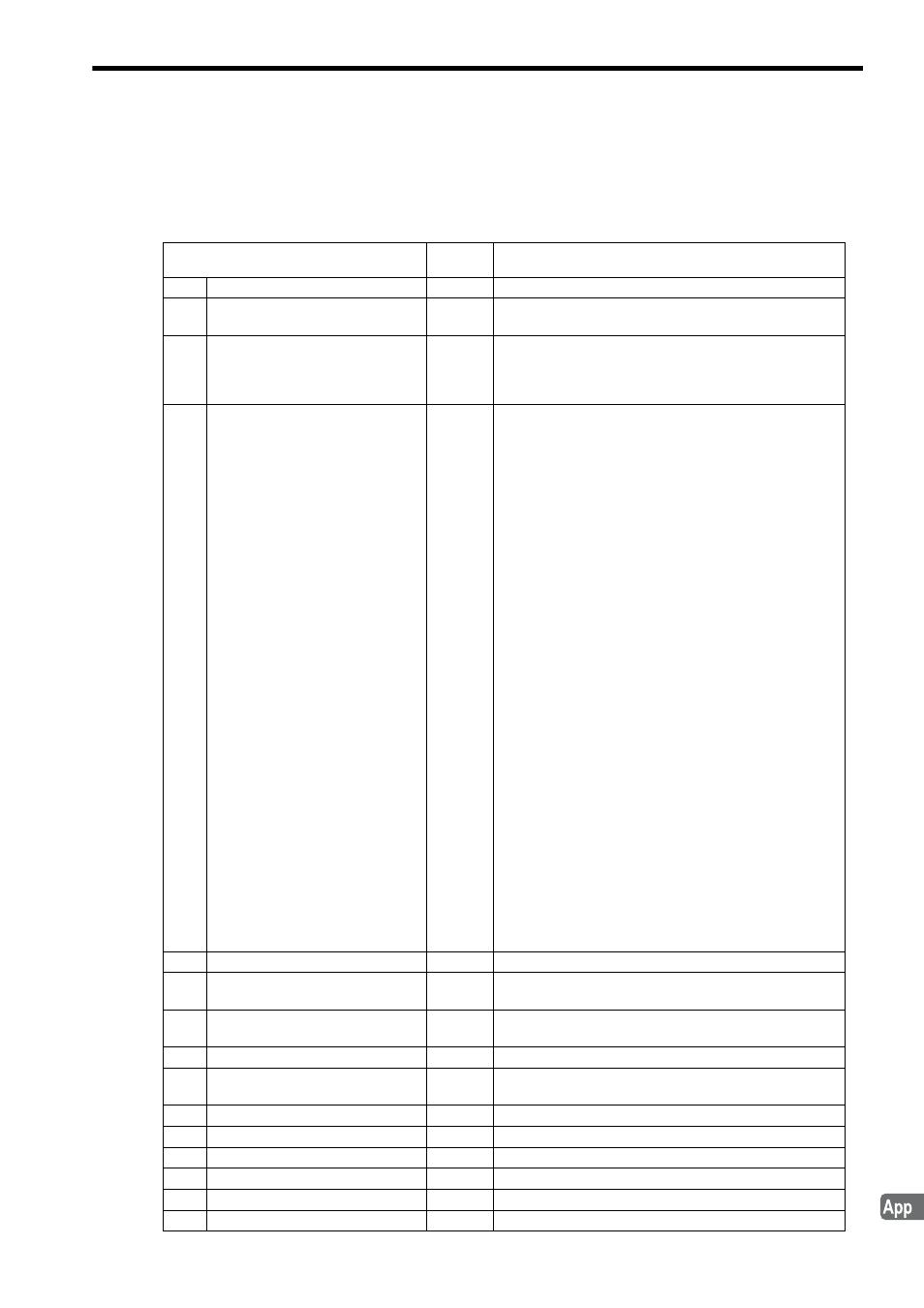
( 1 ) Limitation in Application of Motion Commands
: Applicable,
×: Not applicable, Δ: Limited Application
Motion Command
Applica-
tion
Remarks
0
No command (NOP)
−
1
Position Mode (POSING) (Position-
ing)
−
2
Latch Target Positioning
(EX_POSING)
(External positioning)
Δ
The setting parameter Zero Point Return Travel Distance is
invalid.
The axis moves according to the settings of servo driver param-
eter.
3
Zero Point Return (ZRET)
Δ
The following limitation will be applied for each home return
type.
DEC + C-Phase Pulse
The following setting parameters are invalid:
Zero Point Return Direction Selection, Approach Speed,
Creep Rate, and Zero Point Travel Distance
ZERO (ZERO Signal)
The following setting parameters are invalid:
Zero Point Return Direction Selection and Zero Point Return
Travel Distance
DEC1 + ZERO (DEC1 and ZERO Signal):
The following setting parameters are invalid:
Zero Point Return Direction Selection, Approach Speed,
Creep Rate, and Zero Point Return Travel Distance
C-Phase Pulse
The following setting parameters are invalid:
Zero Point Return Direction Selection and Zero Point Return
Travel Distance
C pulse only,
POT & C pulse,
HOME LS & C pulse,
HOME only,
NOT & C pulse, and
INPUT & C pulse:
The setting parameter Zero Point Return Travel Distance is
invalid.
The servo driver parameters are used for the above
invalid parameters.
Applicable home return types will differ depending on
the servo being used.
4
Interpolation (INTERPOLATE)
−
5
Last Interpolation Segment
(ENDOF_INTERPOLATE)
−
6
Interpolation Mode with Latch Input
(LATCH)
−
7
JOG Mode (FEED)
−
8
Relative Position Mode (STEP)
(Step mode)
−
9
Set Zero Point (ZSET)
−
10
Change Acceleration Time (ACC)
×
Invalid
11
Change Deceleration Time (DCC)
×
Invalid
12
Change Filter Time Constant (SCC)
×
Invalid
13
Change Filter Type (CHG_FILTER)
×
Invalid
14
Change Speed Loop Gain (KVS)
×
Invalid