3 system startup when replacing electronic devices – Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 52
3.3 System Startup Using Self-Configuration
3.3.3 System Startup when Replacing Electronic Devices
3-9
Self-configuration and Created Definition Files
3.3.3 System Startup when Replacing Electronic Devices
Use the following procedure to start the system when replacing SERVOPACKs, Optional Modules, and other elec-
tronic devices due to malfunctions and other causes.
1.
Back up applications.
Before replacing the electronic devices, log on to the Machine Controller online using MPE720 and select Trans-
fer - All Files - From Controller to MPE720 to create a backup of the application.
2.
Turn OFF the power to the Machine Controller.
Log off from the Machine Controller and turn OFF the Machine Controller power.
3.
Start the electronic device to be added.
Make the DIP and rotary switch settings required for the device to be added.
For MECHATROLINK slaves, make the switch settings, and turn ON the power to the slave. Confirm that the
device starts correctly and then turn OFF the power.
4.
Replace the electronic device.
Remove the electronic device to be replaced, connect the new device to the Machine Controller, and turn ON the
power to all MECHATROLINK slaves.
5.
Turn ON the Machine Controller power.
6.
Save SERVOPACK Parameters.
If a SERVOPACK has been replaced, use the following procedure to write the SERVOPACK parameters saved to
the Machine Controller to the new SERVOPACK.
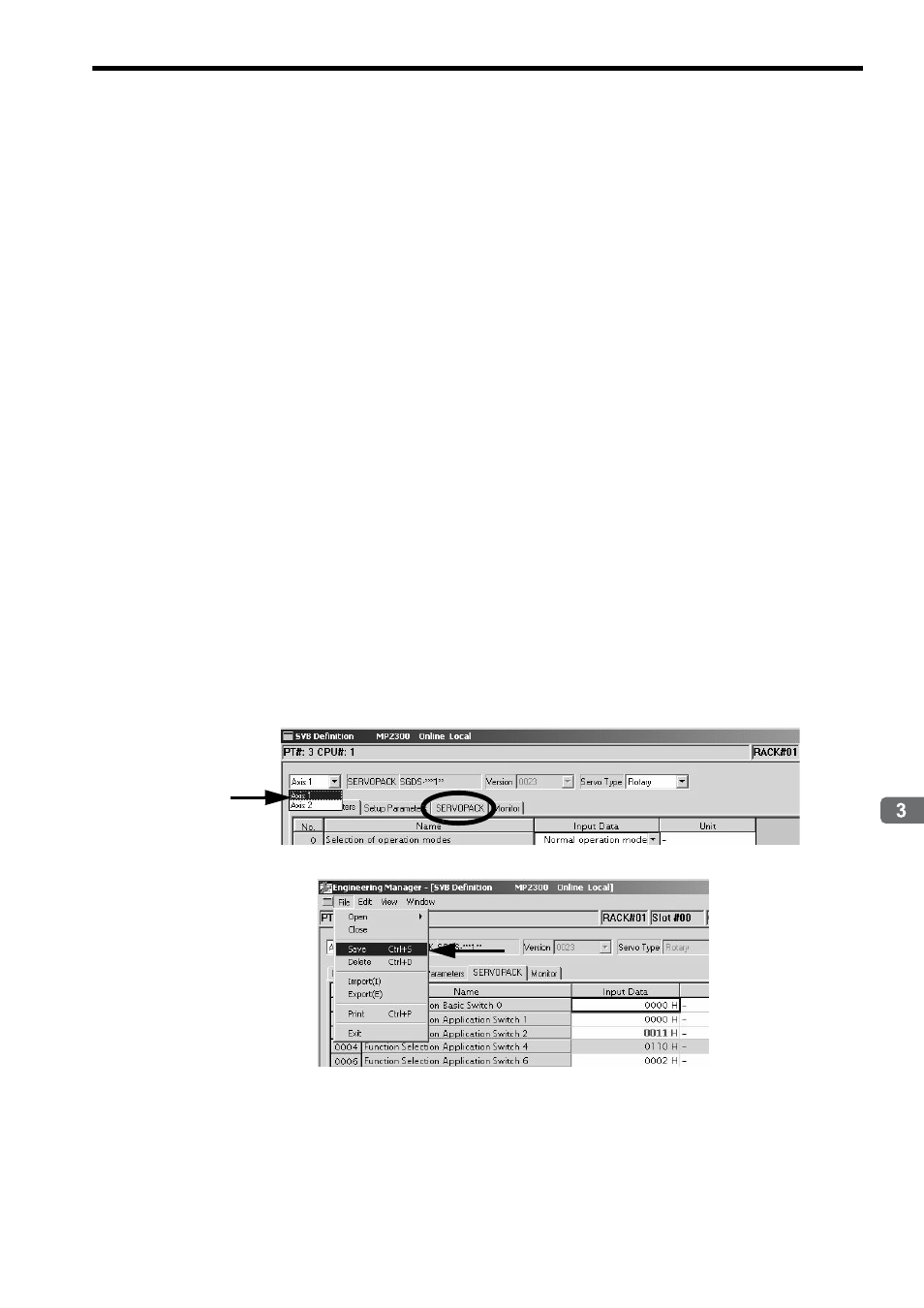
a) Select the axis, then select the SERVOPACK Tab Page on the SVB Definition Window (refer to
3.4.3 SVB Definition) to display the SERVOPACK Tab Page.
b) Click File - Save to write the SERVOPACK settings to the SERVOPACK.
The Machine Controller SERVOPACK settings data is written to all SERVOPACKs when Save is executed, and
the settings data is also written in the Machine Controller Current Value data column.
7.
Turn ON the power to the Machine Controller and SERVOPACKs.
Turn ON (OFF to ON) the power to the Machine Controller and SERVOPACKs and then enable the parameters
written to the SERVOPACKs.
This completes the system startup procedure when electric devices have been replaced.