22 ) gain and bias settings – Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 124
4.4 MP2000 Series Machine Controller Parameter Details
4.4.2 Motion Setting Parameter Details
4-48
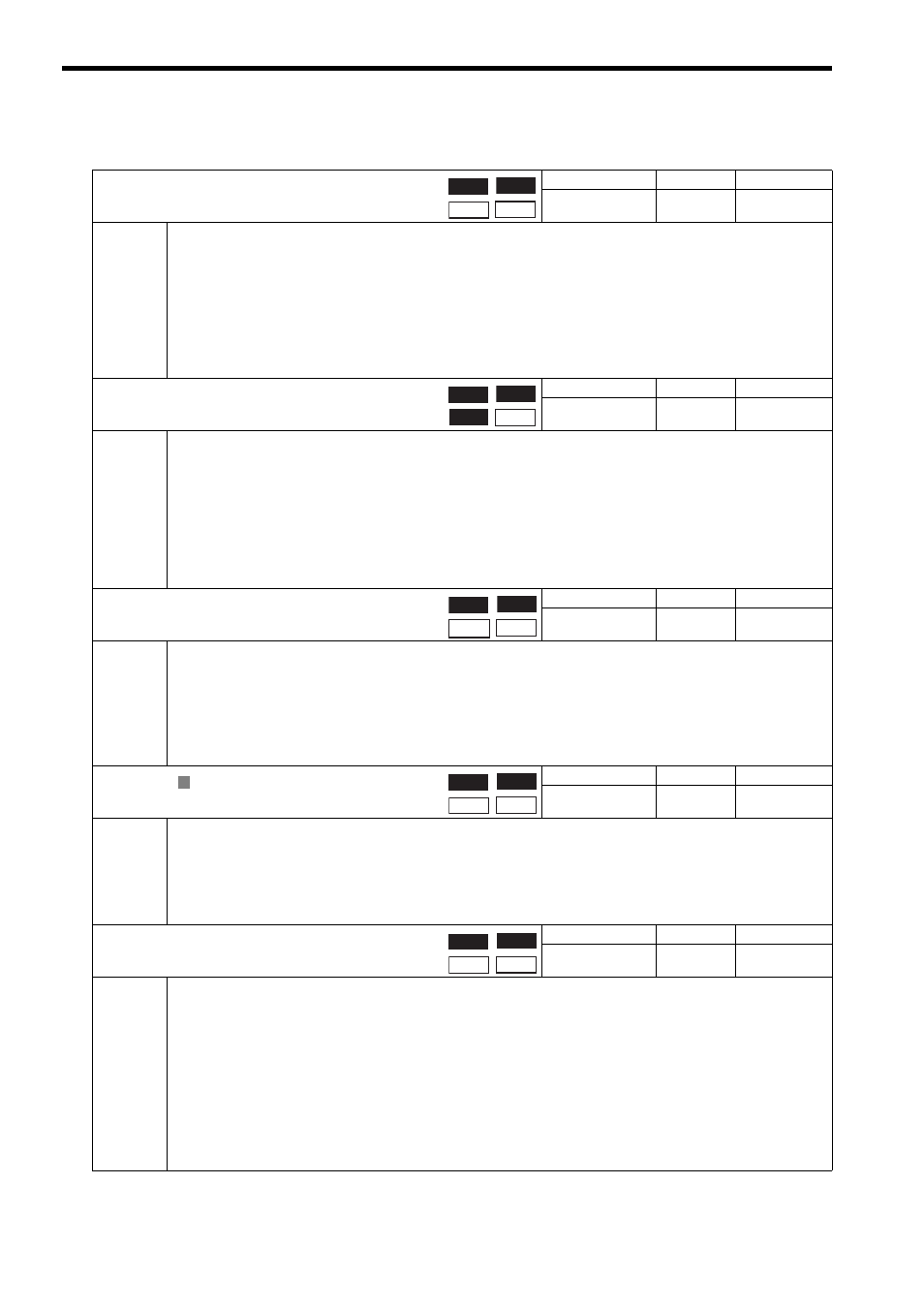
( 22 ) Gain and Bias Settings
OW
2E
Position Loop Gain
Setting Range
Setting Unit
Default Value
0 to 32767
0.1/s
300
Description
Determine the responsiveness for the SERVOPACK’s position loop.
If the position loop gain is set high, the responsiveness is high and the positioning time is short. Set the optimum value for
the machine rigidity, inertia, and type of Servomotor. The actual machine operation depends on the settings in the SER-
VOPACK parameters. Refer to 11.6 Parameters That Are Automatically Updated for information on user constants self-
writing function.
If this parameter changes, the corresponding SERVOPACK parameter will change automatically. This function is
achieved using the Servo command expansion area and can be executed when using the MECHATROLINK-II (32-byte
Mode) communication method. The motion command KPS must be used to make changes to this parameter.
When SGDV SERVOPACKs are used and the tuning-less function is available, this setting is ignored.
OW
2F
Speed Loop Gain
Setting Range
Setting Unit
Default Value
1 to 2000
Hz
40
Description
Determine the responsiveness for the SERVOPACK’s speed loop.
The Servo system will be more stable the higher this parameter is set, as long as the value is within the range in which the
mechanical system does not oscillate. The actual machine operation depends on the settings in the SERVOPACK parame-
ters. Refer to 11.6 Parameters That Are Automatically Updated for information on user constants self-writing function.
If this parameter changes, the corresponding SERVOPACK parameter will change automatically.
This function is achieved using the Servo command expansion area and can be executed when using the MECHA-
TROLINK-II (32-byte Mode) communication method. The motion command KVS must be used to make changes to this
parameter.
When SGDV SERVOPACKs are used and the tuning-less function is available, this setting is ignored.
OW
30
Speed Feedforward Amends
Setting Range
Setting Unit
Default Value
0 to 32767
0.01%
0
Description
Reduces positioning time by applying feed forward compensation.
This setting is effective for positioning control commands. Always set this parameter to 0 for phase control.
If this parameter changes, the corresponding SERVOPACK parameter will change automatically.
This function is achieved using the Servo command expansion area and can be executed when using the MECHA-
TROLINK-II (32-byte Mode) communication method. The motion command KFS must be used to make changes to this
parameter.
When SGDV SERVOPACKs are used and the tuning-less function is available, this setting is ignored.
OW
31
Speed Compensation
Setting Range
Setting Unit
Default Value
-32768 to 32767
0.01%
0
Description
Set the speed feed forward gain as a percentage of the rated speed for the interpolation (INTERPOLATE), phase
reference (PHASE), and latch (LATCH) commands.
The setting unit for this parameter is 0.01% (fixed).
Secondly Speed Compensation (OL
16) can be used with the phase reference command (PHASE), and
the unit can be selected for OL
16. When used at the same time as OL
16, speed compensation can
be applied twice.
OW
32
Position Integration Time Constant
Setting Range
Setting Unit
Default Value
0 to 32767
ms
0
Description
Set the position integration time constant.
Use this parameter to improve the following precision in applications such as electronic cams or shafts.
The actual machine operation depends on the settings in the SERVOPACK parameters. Refer to 11.6 Parameters That Are
Automatically Updated for information on user constants self-writing function.
If this parameter changes, the corresponding SERVOPACK parameter will change automatically.
This function is achieved using the Servo command expansion area and can be executed when using the MECHA-
TROLINK-II (32-byte Mode) communication method. The motion command KIS must be used to make changes to this
parameter.
There is no parameter to set the integration time constant in the SGD-N or SGDB-N SERVOPACK, so the Position Inte-
gration Time Constant cannot be used.
When SGDV SERVOPACKs are used and the tuning-less function is available, this setting is ignored.
Position
Phase
Torque
Speed
Position
Phase
Speed
Torque
Position
Phase
Torque
Speed
R
Position
Phase
Torque
Speed
Position
Phase
Speed Torque