Switching commands during execution – Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 283
7.2 Motions After Switching Motion Commands
7.2.2 Switching from EX_POSING
7-13
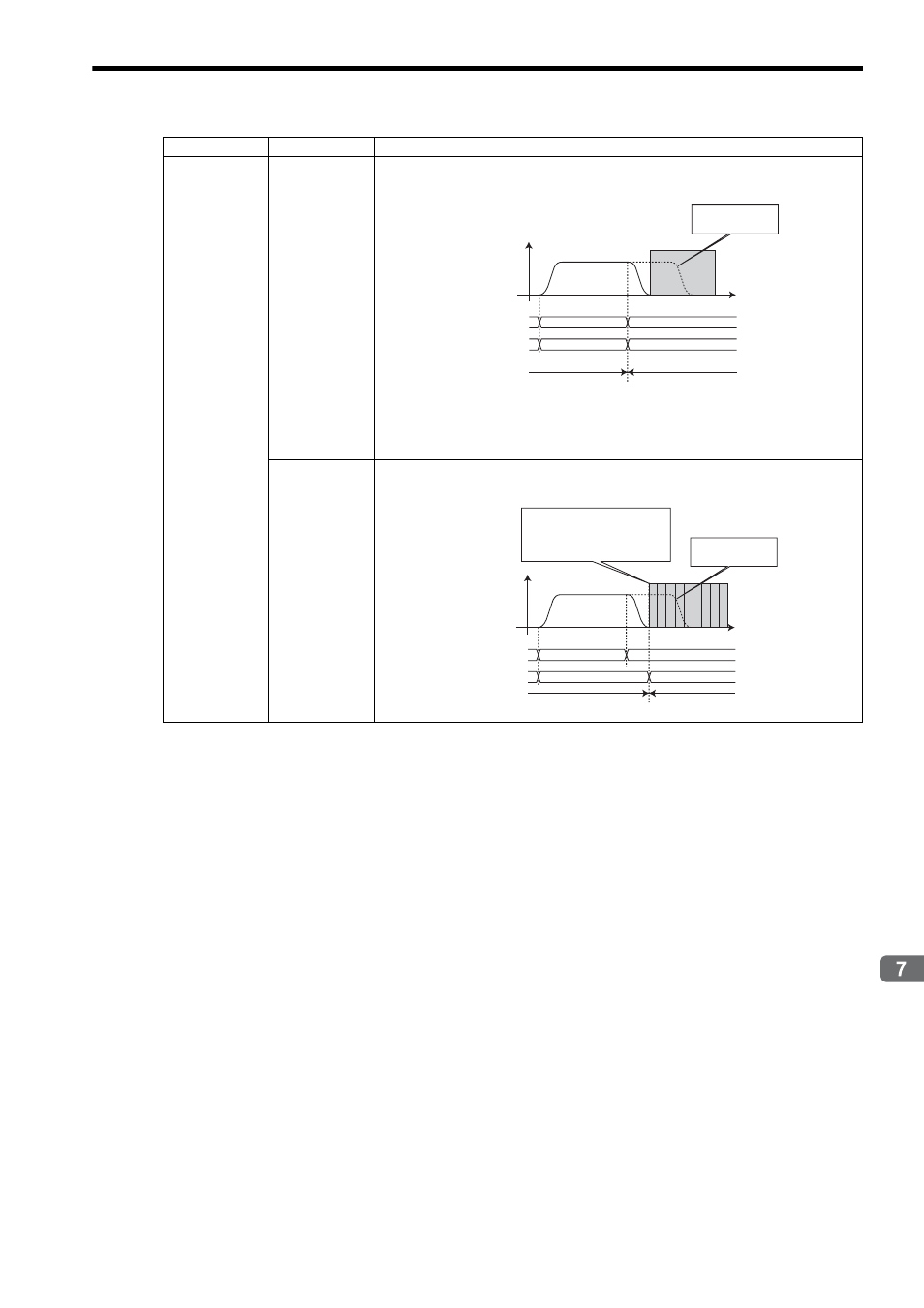
Switching Commands during Execution
EX_POSING
TRQ
EX_POSING will switch to TRQ when the axis stops after deceleration, and the control
mode will change from position control mode to torque control mode.
After EX_POSING has switched to TRQ, the TRQ command will be executed
without the acceleration/deceleration filter. This is because TRQ is a motion
command for which the acceleration/deceleration filter is disabled.
PHASE
EX_POSING will switch to PHASE when the axis stops after deceleration, and the control
mode will change from the position control mode to phase control mode.
Switched From
Switched To
Operation
Cancelled
EX_POSING
operation
EX_POSING
TRQ
EX_POSING
TRQ
EX_POSING
TRQ
Position control mode
Torque control mode
Motion command
Motion command
response
Cancelled
EX_POSING
operation
The reference value of the PHASE
command will be output as is
regardless of the speed at the
time the motion command is
switched.
EX_POSING
PHASE
EX_POSING
PHASE
EX_POSING
PHASE
Position control mode
Phase control mode
Motion command
Motion command
response