Caution – Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 352
9.4 Absolute Position Detection for Infinite Length Axes
9.4.2 Parameter Settings for Simple Absolute Infinite Length Position Control
9-15
Absolute Position Detection
9.4.2 Parameter Settings for Simple Absolute Infinite Length Position Control
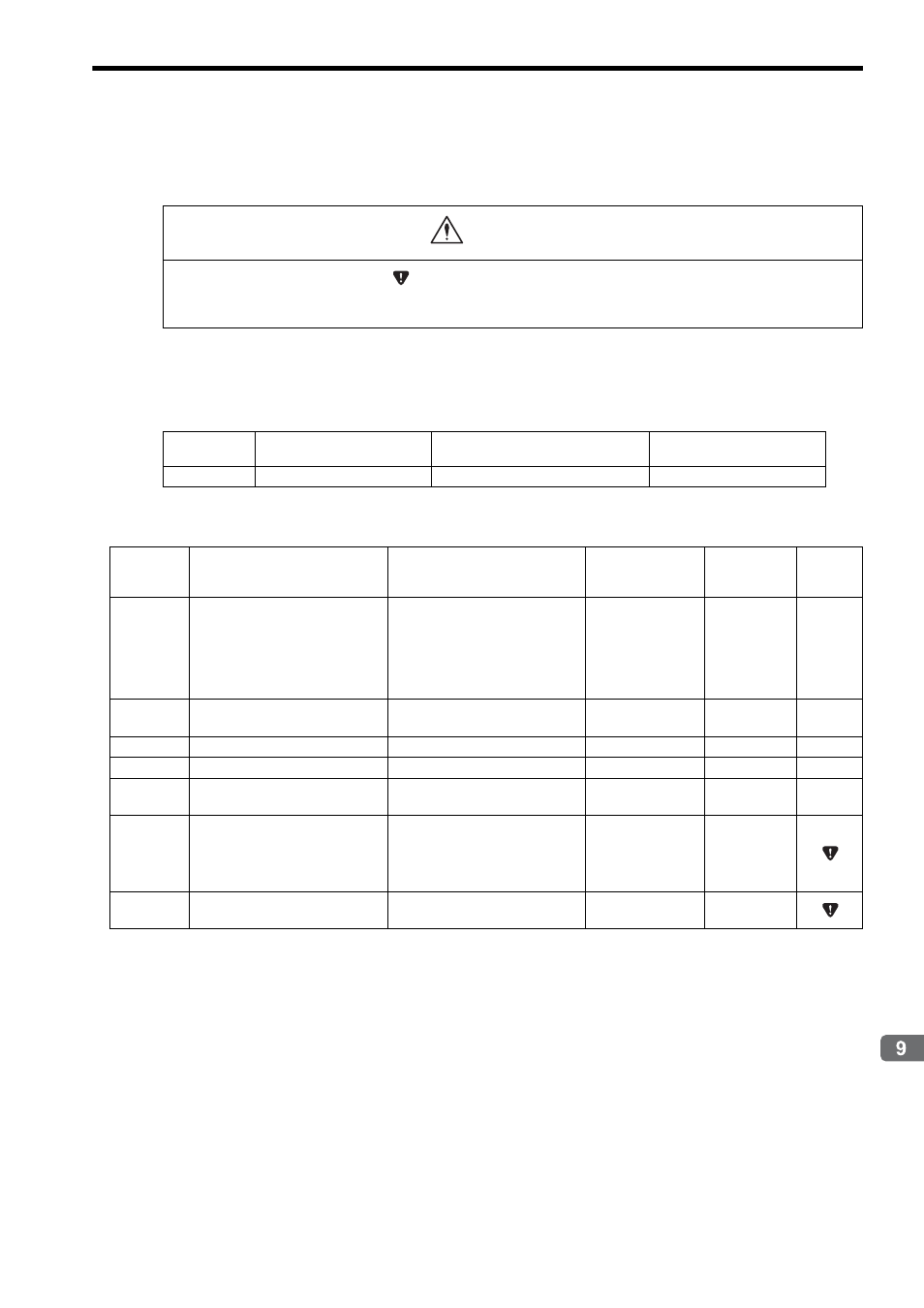
Set the following parameters to use the Simple Absolute Infinite Length Position Control for an infinite length axis.
( 1 ) Parameters Settings for Simple Absolute Infinite Length Position Control
Set the fixed parameters No.1 bit 0 and bit 9, and No. 30 as follows to set the Simple Absolute Infinite Length Position
Control for an infinite length axis.
( 2 ) Machine Controller Fixed Parameters for Absolute Position Detection
The parameters for which
precautions are provided must be set referring to 9.3.1 ( 3 ) Detailed
Descriptions. Set these parameters carefully. If they are not set correctly, the current position may not be
correct after the power is turned ON. Machine damage may occur.
CAUTION
Parameter
Fixed Parameter No. 1, Bit 0
(Axis Selection)
Fixed Parameter No. 1, Bit 9
(Simple Rotary Pos. Mode)
Fixed Parameter No. 30
(Encoder Selection)
Setting
1: Infinite length axis
1: Enabled
1: Absolute encoder
Fixed
Parameter
No.
Name
Setting/Range
Units
Reference
Caution
No.
4
Reference Unit Selection
0: pulse
1: mm
2: deg
3: inch
(Electric gear is disabled when
pulse is selected.)
−
−
−
No.
6
Travel Distance per Motor Rota-
tion
1 to 2
31
−1
1 = 1 reference unit
−
−
No.
8
Servo Motor Gear Ratio
1 to 65535
1 = 1 rotation
−
−
No.
9
Machine Gear Ratio
1 to 65535
1 = 1 rotation
−
−
No.
10
Infinite Length Axis Reset Posi-
tion (POSMAX)
1 to 2
31
−1
Reference unit
−
−
No.
36
Number of Pulses per Motor
Rotation
1 to 2
31
−1 (Set the value after mul-
tiplication. For example, set 2
16
=
65536 when using a 16-bit
encoder)
pulse
9.4.2 ( 4 ) [ b ]
No.
38
Maximum Number of Absolute
Encoder Turns Rotation
0 to 2
31
−1
1 = 1 rotation
9.4.2 ( 4 ) [ c ]