2 ) parameter settings – Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 425
11.2 Overtravel Function
11.2.1 Connections to
Σ-II/III/V Series SGDH, SGDS, or SGDV SERVOPACK
11-10
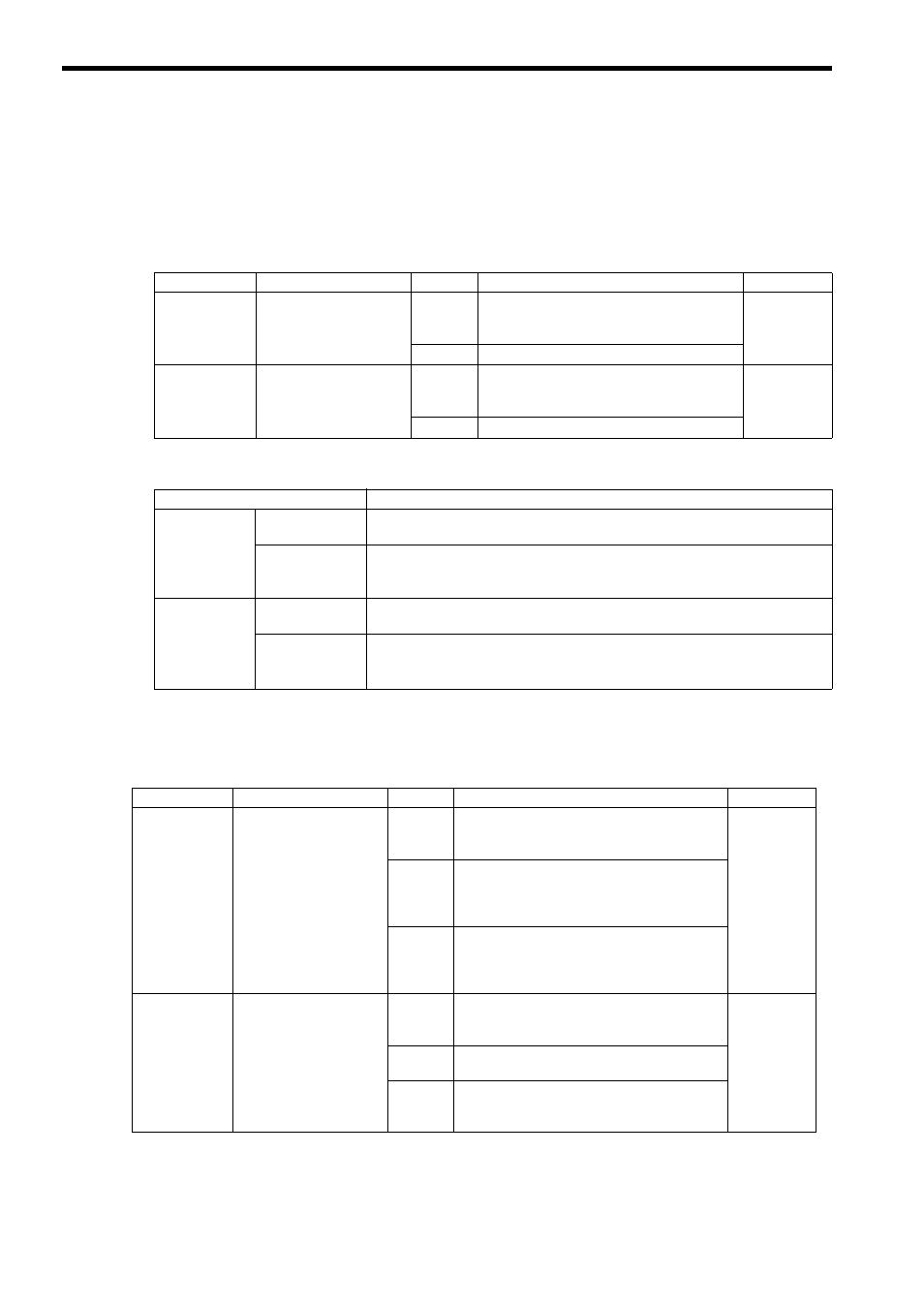
( 2 ) Parameter Settings
[ a ] Use/Not Use Overtravel Input Signals
The following parameters are used to enable and disable the overtravel input signals.
These parameters are disabled by executing a self-configuration command.
• SGDH SERVOPACKs
• SGDS and SGDV SERVOPACKs
[ b ] Selecting Motor Stopping Methods for Overtravel
When using the overtravel function has been enabled, the following parameters are used to set the methods for stopping
the motor. Select the methods for stopping when the P-OT or N-OT is input during motor running.
Parameter
Name
Set Value
Item
Default
Pn50A.3
P-OT Signal Mapping
2
(Recom-
mended)
Enables use of Positive Prohibit Input Signal
(P-OT). Forward rotation prohibited when
open, allowed for 0 V.
2
8
Disables the P-OT signal.
Pn50B.0
N-OT Signal Mapping
3
(Recom-
mended)
Enables use of Negative Prohibit Input Signal
(N-OT). Reverse rotation prohibited when
open, allowed for 0 V.
3
8
Disables the N-OT signal.
Parameter
Item
Pn50A.0
n.1
Enables use of Positive Prohibit Input Signal (P-OT).
Forward rotation prohibited when CN1-7 is open and allowed at 0 V. (Default setting)
n.8
Disables use of Positive Prohibit Input Signal (P-OT).
Constant forward rotation allowed. Equivalent to short circuit between the CN1-7 and
0 V (Control power supply for sequence signal input).
Pn50B.0
n.
2
Enables use of Negative Prohibit Input Signal (N-OT).
Reverse rotation prohibited when CN1-8 is open and allowed at 0 V. (Default setting)
n.
8
Disables use of Negative Prohibit Input Signal (N-OT).
Constant
reverse
rotation allowed.
Equivalent to short circuit between the CN1-8
and 0 V
(Control power supply for sequence signal input).
Parameter
Name
Set Value
Item
Default
Pn001.1
Overtravel Stop Mode
0
(Recom-
mended)
Stops the motor according to Pn001.0 setting
(dynamic brake or coasting) when overtravel is
detected.
0
1
Decelerates the motor to a stop by applying the
torque specified in Pn406 (Emergency Stop
Torque) when overtravel is detected, and then
sets it to zero clamp (servolock) mode.
2
Decelerates the motor to a stop by applying the
torque specified in Pn406 (Emergency Stop
Torque) when overtravel is detected, and then
sets it to coast (servo OFF) mode.
Pn001.0
Servo OFF Stop Mode
0
(Recom-
mended)
Stops the motor by applying dynamic brake (DB)
and then holds the DB.
0
1
Stops the motor by applying dynamic brake (DB)
and then releases the DB.
2
Makes the motor coast to a stop.
Current is not supplied to the motor and the
machine stops due to friction.