3 software limit function, 1 fixed parameter settings, 2 effects of the software limit function – Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 428
11.3 Software Limit Function
11.3.1 Fixed Parameter Settings
11-13
Utility Functions
11.3 Software Limit Function
The software limit function is used to set upper and lower limits for the range of machine movement in fixed parame-
ters so the Machine Controller can constantly monitor the operating range of the machine. The function can be used to
help prevent machine runaway or damage due to incorrect operation as well as incorrect references in a motion pro-
gram.
Disable the software limits in the SERVOPACK to use the Machine Controller for position control in the machine coor-
dinate system.
Refer to your SERVOPACK manual for the procedure on disabling software limits.
11.3.1 Fixed Parameter Settings
The following fixed parameters must be set in order to use the software limit function.
The software limit function is enabled only after completing a Zero Point Return or Zero Point Setting operation.
If any fixed parameters are changed and saved or the power is turned ON, the Zero Point Return or Zero Point Set-
ting operation must be performed again.
11.3.2 Effects of the Software Limit Function
If a position command that exceeds the positive and negative software limit is executed with the software limit function
enabled, an alarm will occur and the Machine Controller will stop the axis. The type that the axis stops depends on the
motion command as shown below.
The software limit settings is disabled for ZRET operation.
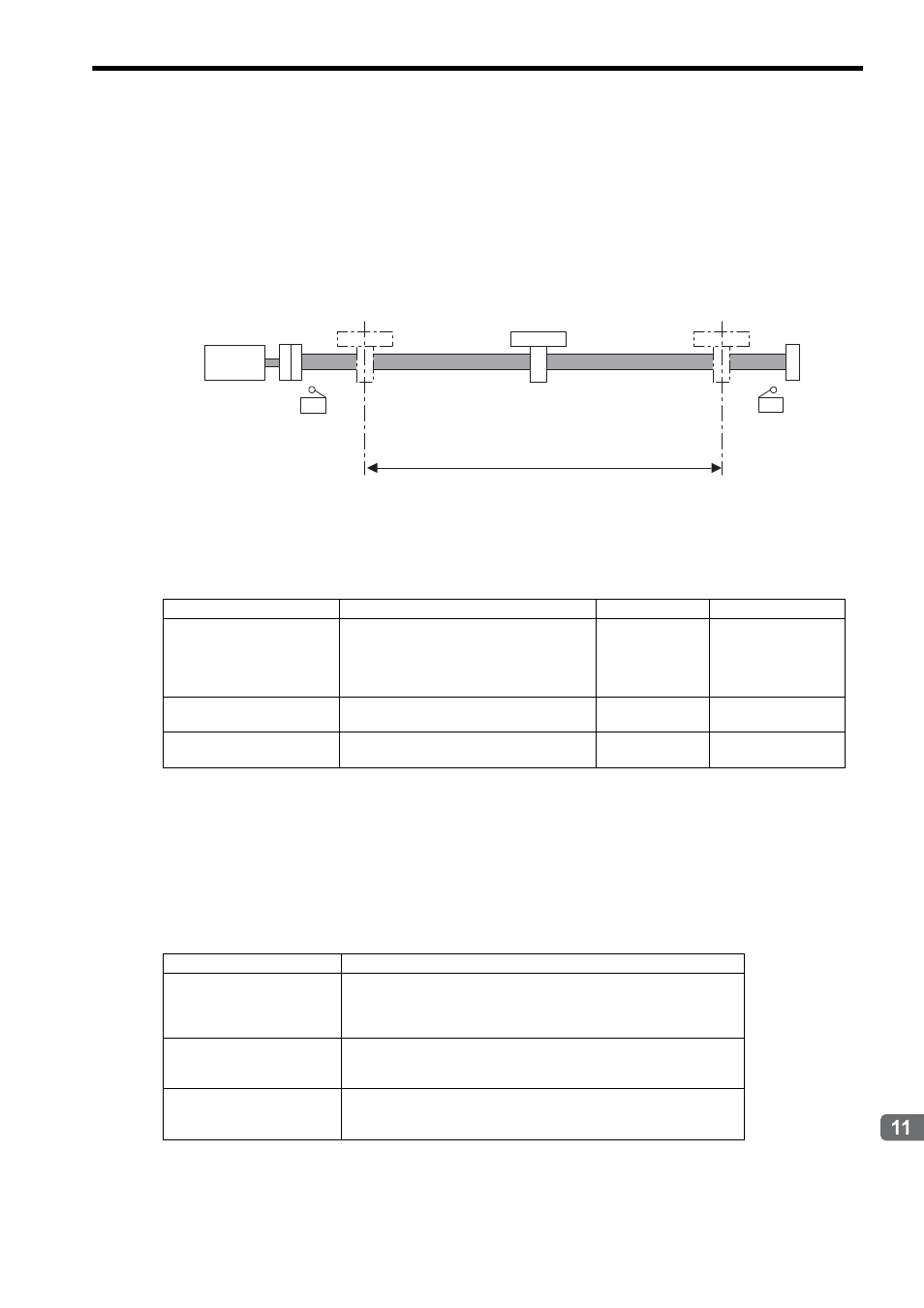
Servo-
motor
Negative
overtravel
Software Limit,
lower limit
Range of machine movement
Positive
overtravel
Software Limit,
upper limit
Fixed Parameter Number
Name
Unit
Setting/Range
1
Function Selection Flag 1
Bit 1: Soft Limit (Positive Direction)
Enable/Disable
Bit 2: Soft Limit (Negative Direction)
Enable/Disable
−
0: Disable, 1: Enable
0: Disable, 1: Enable
12
Positive Software Limit Value
Reference unit
−2147483648
to 2147483647
14
Negative Software Limit Value
Reference unit
−2147483648
to 2147483647
Motion Command
Stop Operation
POSING
EX_POSING
FEED
STEP
The axis will start decelerating before the software limit position and stop
at the software limit position.
INTERPOLATE
ENDOF_INTERPOLATE
LATCH
The pulse distribution command will stop executing at the software limit
position. The Servo will perform an emergency stop.
VELO
TRQ
PHASE
The axis will start decelerating the software limit position and stop
beyond the software limit position.