H.3 link assignment, A-36 – Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 525
Appendix H Wild Card Servos
H.3 Link Assignment
A-36
H.3
Link Assignment
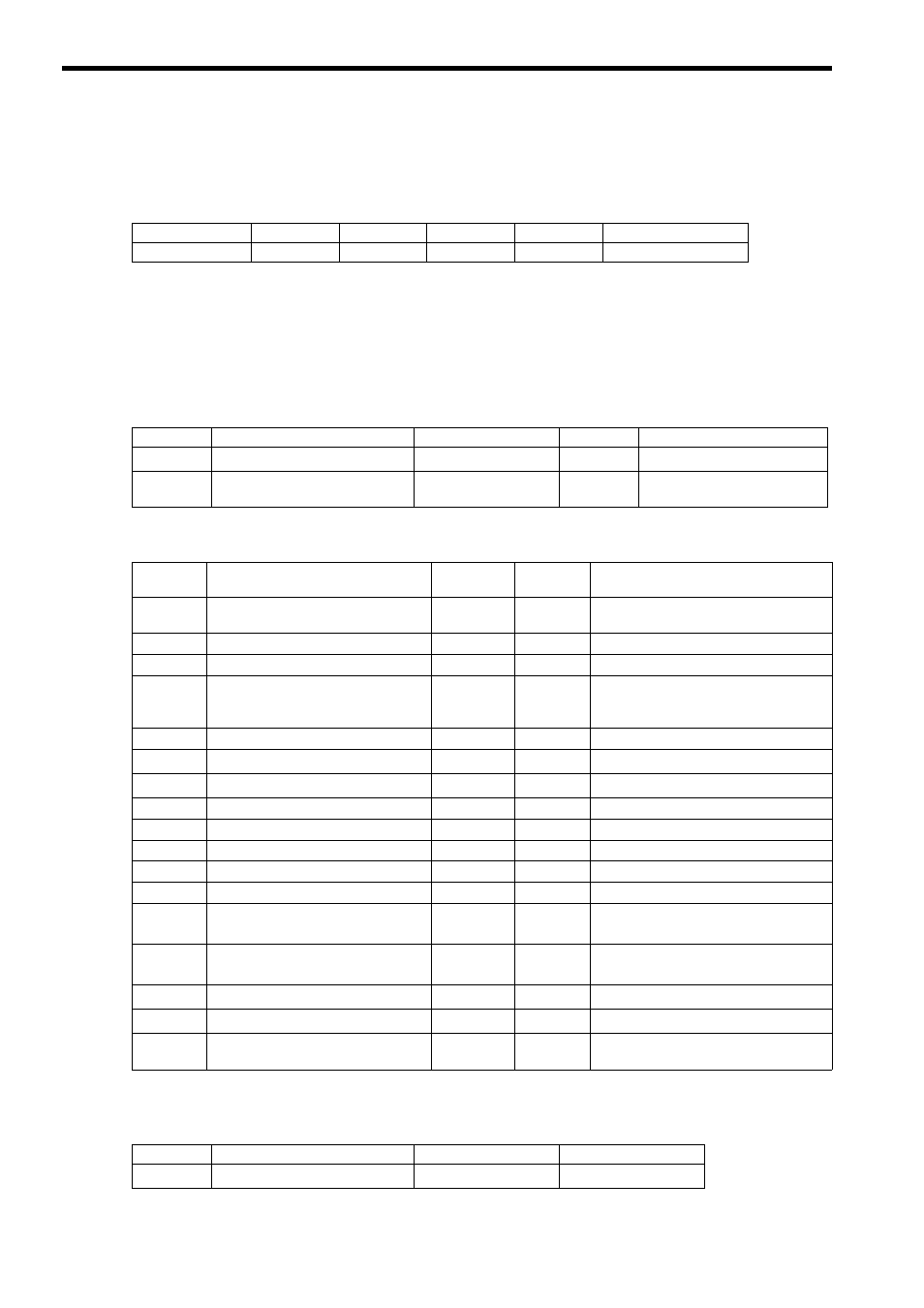
Start the MPE720 to open the Link Assignment Tab bed Page in the MECHATROLINK Transmission Definition
Window. Make the settings as shown in the table below in the station where you want to allocate a wild card servo.
SVB Module operates as though the actual object is true, despite the setting. If “*****SERVO” is set in place of
“SGDS-
1
” for example, the SVB Module recognizes it as SGDS and operates accordingly.
H.4
Invalid Motion Parameters When Using Wild Card Servos
The following motion parameters are invalid when using wild card servos.
Fixed Parameters
Setting Parameters
* Valid only for VELO (Speed Reference) command.
Monitoring Parameters
TYPE
INPUT
SIZE
OUTPUT
SIZE
SCAN
*****SERVO
Blank
Blank
Blank
Blank
HIGH (Fixed)
No.
Name
Setting Range
Default
Description
16
Backlash Compensation Amount -2
31
to 2
31
-1
0
1 = 1 reference unit
29
Motor Type Selection
0: Rotation type motor,
1: Linear motor
0: Rotation
type motor
Register
Name
Setting
Range
Default
Description
OW
03 Function Setting 1
0 or 1
0
Bits 4 to 7: Acceleration/Deceleration
Degree Unit Selection
OW
04 Function Setting 2
0 to 14
0
Bits 12 to 15: Bank Selector
OW
06 Option Setting
Bit setting
0
Bits 10 to 15: Options for Stepper
OW
09 Motion Command Control Flag
Bit setting
0
Bit 3: Zero Point Return Direction Selec-
tion
Bit 4: Latch Zone Effective Selection
OL
1E
Width of Positioning Completion
0 to 65535
100
1 = 1 reference unit
OL
2A
Latch Zone Lower Limit Setting
-2
31
to 2
31
-1
0-2
31
1 = 1 reference unit
OL
2C
Latch Zone Upper Limit Setting
-2
31
to 2
31
-1
2
31
-1
1 = 1 reference unit
OW
2E Position Loop Gain
0 to 32767
300
1 = 1.0/s
OW
2F Speed Loop Gain
1 to 2000
40
1 = 1 Hz
OW
30 Speed Feedforward Amends
0 to 32767
0
1 = 0.01%
OW
32 Position Integration Time Constant
0 to 32767
0
1 = 1 ms
OW
34 Speed Integration Time Constant
15 to 65535
2000
1 = 0.01 ms
OW
36
Straight Line Acceleration/Accelera-
tion Time Constant
*
0 to 2
31
-1
0
1 = 1 reference unit/s
2
, 1 = 1 ms
OW
38
Straight Line Deceleration/Decelera-
tion Time Constant
*
0 to 2
31
-1
0
1 = 1 reference unit/s
2
, 1 = 1 ms
OW
3A Filter Time Constant
*
0 to 65535
0
1 = 0.1 ms
OL
42
Zero Point Return Travel Distance
-2
31
to 2
31
-1
0
1 = 1 reference unit
OL
46
External Positioning Final Travel
Distance
-2
31
to 2
31
-1
0
1 = 1 reference unit
Register
Name
Setting Range
Description
IL
42
Feedback Torque/Thrust
-2
31
to 2
31
-1
1 = 0.01% or 0.0001%