Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 130
4.4 MP2000 Series Machine Controller Parameter Details
4.4.2 Motion Setting Parameter Details
4-54
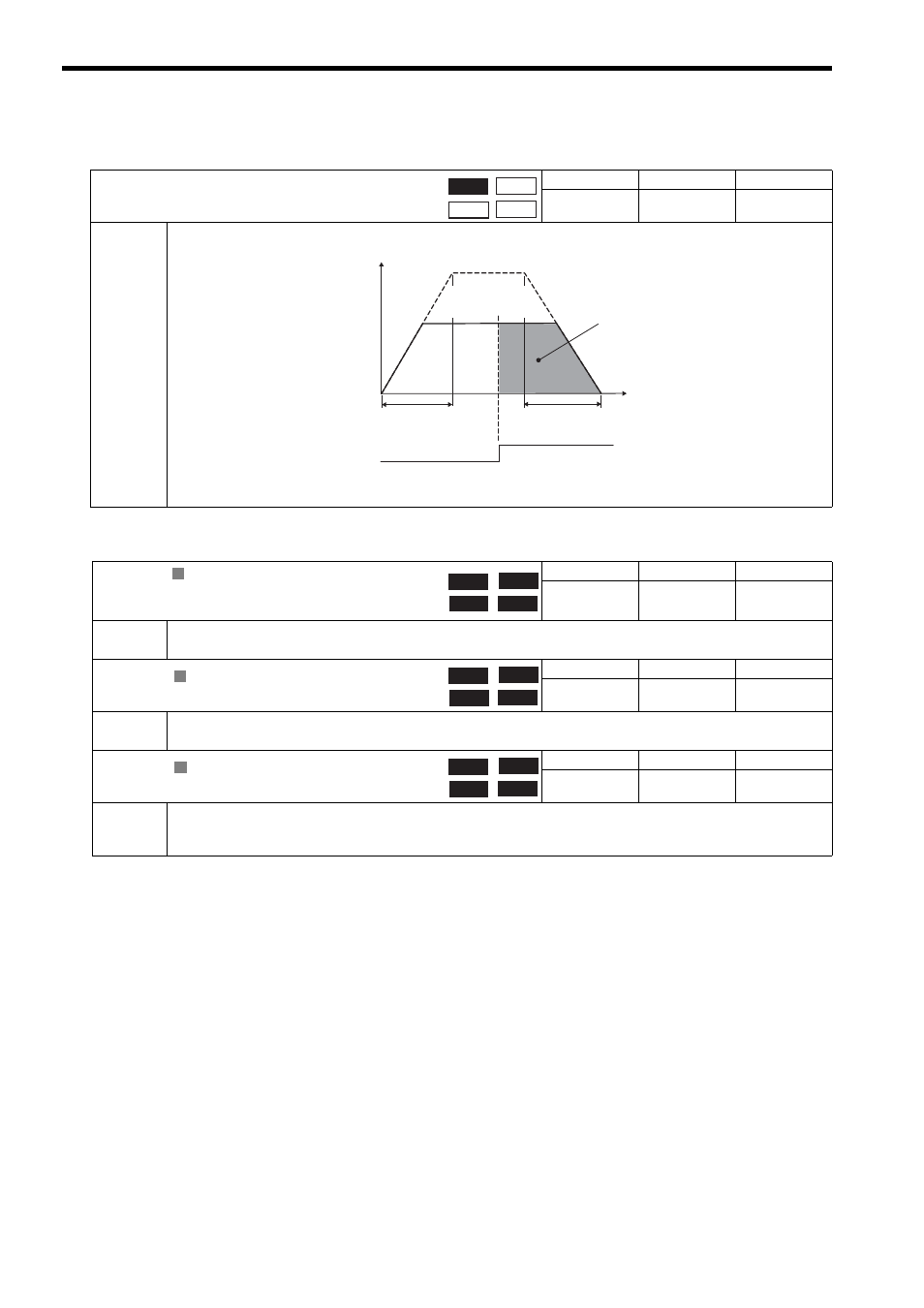
( 27 ) External Positioning Final Travel Distance
( 28 ) Coordinate System Settings
For information on how to use these functions, refer to Chapter 9 Absolute Position Detection.
OL
46
External Positioning Final Travel Distance
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Reference unit
0
Description
Set the distance from the time the external signal is input for external positioning command (EX_POSING).
Refer to 6.2.2 Latch Target Positioning (EX_POSING) (External Positioning) for details.
OL
48
Zero Point Position in Machine Coordinate System
Offset
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Reference unit
0
Description
Set the offset to shift the machine coordinate system.
This parameter is always enabled, so be sure that the setting is correct.
OL
4A
Work Coordinate System Offset
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Reference unit
0
Description
Set the offset to shift the work coordinate system.
This parameter is always enabled, so be sure that the setting is correct.
OL
4C
Number of POSMAX Turns Presetting Data
Setting Range
Setting Unit
Default Value
−2
31
to 2
31
−1
Turn
0
Description
When the POSMAX Turn Number Presetting Demand bit (setting parameter OW
00, bit 6) is set to 1, the val-
ue set here will be preset as the Number of POSMAX Turns (monitoring parameter IL
1E).
This parameter is invalid for linear type.
Position
Phase
Speed Torque
(OL
46)
(OL
10)
Speed
Time
Straight Line
Acceleration Time
Constant (OL
36)
Straight Line
Deceleration Time
Constant (OL
38)
External
positioning signal
External Positioning
Final Travel
Distance
Rated speed
Speed Reference
Setting
R
Position
Phase
Speed Torque
R
Position
Phase
Speed Torque
R
Position
Phase
Speed Torque