Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 86
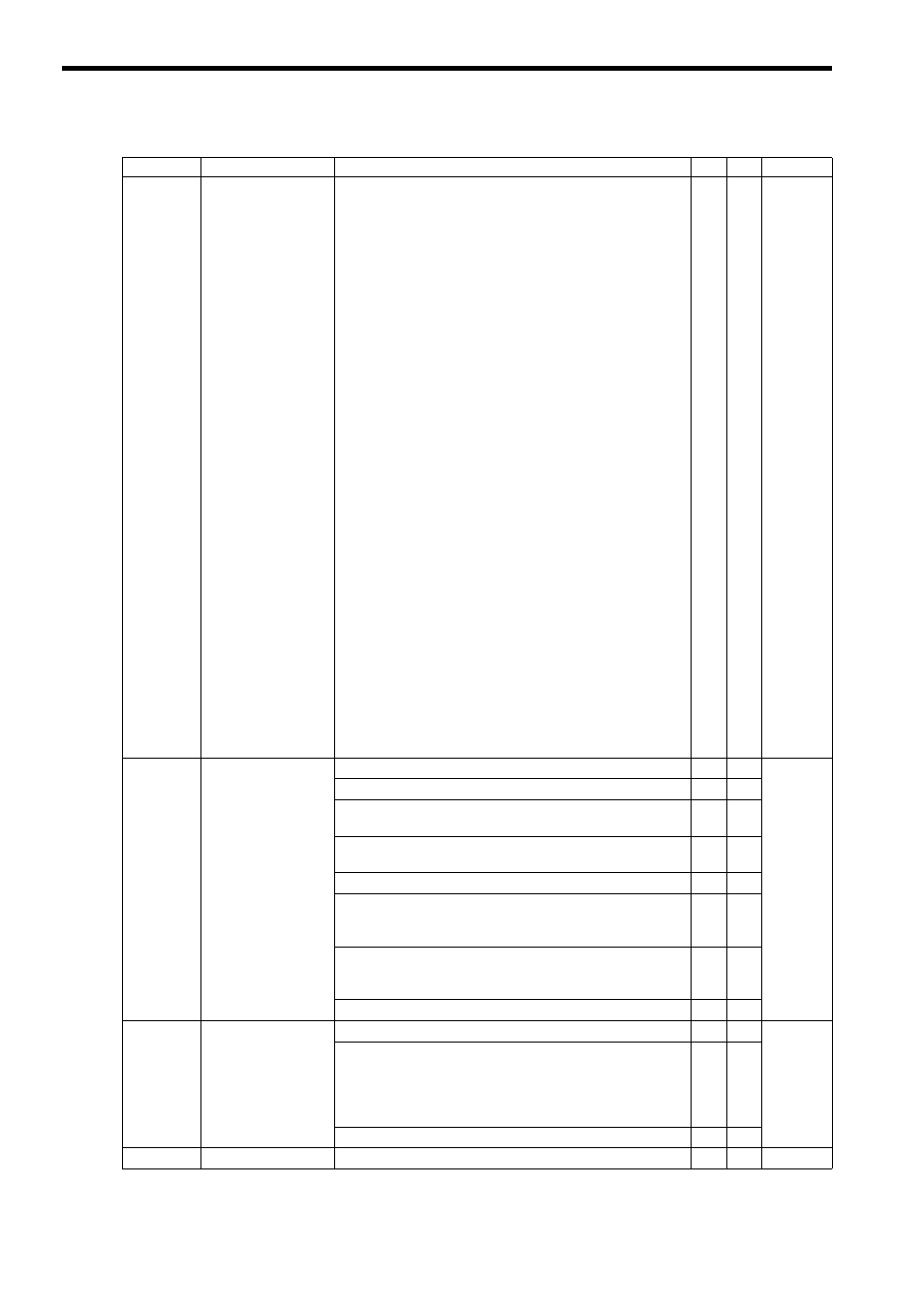
4.3 Motion Parameter Lists
4.3.2 Setting Parameter List
4-10
OW
08 Motion Command
0: NOP (No Command)
1: POSING (Position Mode) (Positioning)
*
2: EX_POSING (Latch Target Positioning)
(External positioning)
*
3: ZRET (Zero Point Return)
*
4: INTERPOLATE (Interpolation)
*
5: ENDOF_INTERPOLATE (Last Interpolation Segment)
*
(Reserved for the system)
6: LATCH (Interpolation Mode with Latch Input)
*
7: FEED (Jog Mode)
*
8: STEP (Relative Position Mode) (Step mode)
*
9: ZSET (Set Zero Point)
10: ACC (Change Acceleration Time)
11: DCC (Change Deceleration Time)
12: SCC (Change Filter Time Constant)
13: CHG_FILTER (Change Filter Type)
14: KVS (Change Speed Loop Gain)
15: KPS (Change Position Loop Gain)
16: KFS (Change Feed-forward)
17: PRM_RD (Read User Constant)
(Read SERVOPACK parameter)
18: PRM_WR (Write User Constant
(Write SERVOPACK parameter)
19: ALM_MON (Alarm Monitor)
20: ALM_HIST (Alarm History Monitor)
21: ALMHIST_CLR (Clear Alarm History)
22: ABS_RST (Absolute Encoder Reset)
23: VELO (Speed Reference)
*
24: TRQ (Torque/Thrust Reference)
*
25: PHASE (Phase Reference)
*
26: KIS (Change Position Loop Integral Time Constant)
27: PPRM_WR (Stored Parameter Write)
39: MLTTRN_SET (Multiturn Limit Setting)
Yes
Yes
4.4.2 ( 7 )
OW
09
Motion Command
Control Flag
Bit 0: Holds a Command (0: OFF/1: ON)
Yes
Yes
4.4.2 ( 8 )
Bit 1: Interrupt a Command (0: OFF/1: ON)
Yes
Yes
Bit 2: Moving Direction (JOG/STEP) (0: Forward rotation/1:
Reverse rotation)
Yes
Yes
Bit 3: Zero point Direction Selection (0: Reverse rotation/1: For-
ward rotation)
Yes
−
Bit 4: Latch Zone Effective Selection (0: Disabled/1: Enabled)
Yes
−
Bit 5: Position Reference Type
(0: Incremental Value Add Method/1: Absolute Value Set
Method)
Yes
Yes
Bit 6: Phase Compensation Type
(0: Incremental Value Add Method/1: Absolute Value Set
Method)
Yes
−
Bits 7 to F: Reserved for system use.
−
−
OW
0A Motion Subcommand
0: NOP (No command)
Yes
Yes
4.4.2 ( 9 )
1: PRM_RD (Read User Constant) (Read SERVOPACK
parameter)
2: PRM_WR (User Constant) (Write SERVOPACK parameter)
3: Reserved
4: SMON (Status monitor)
Yes
−
5: FIXPRM_RD (Read Fixed Parameters)
Yes
Yes
OW
0B
−
Reserved for system use.
−
−
−
* These commands are move commands.
(cont’d)
Register No.
Name
Contents
SVB SVR Reference