Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 282
7.2 Motions After Switching Motion Commands
7.2.2 Switching from EX_POSING
7-12
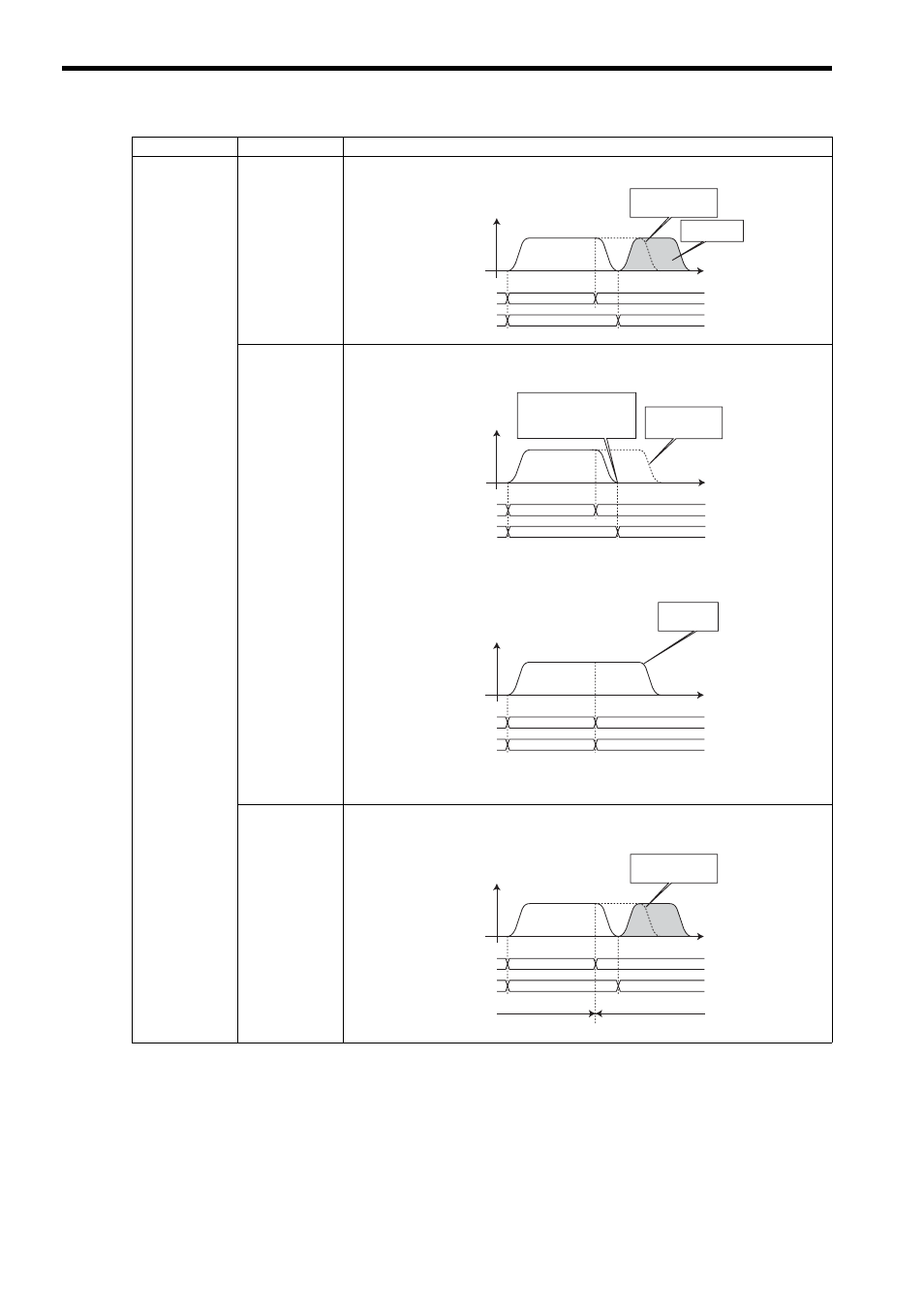
EX_POSING
STEP
EX_POSING will switch to STEP when the axis stops after deceleration.
ZSET
09, bit 5 = 0)> EX_POSING will switch to ZSET when the axis stops after deceleration. 09, bit 5 = 1)> EX_POSING will immediately switch to ZSET, and positioning will continue. In actual operation, set the zero point by executing ZSET in the positioning VELO EX_POSING will switch to VELO when the axis stops after deceleration, and the control Switched From Switched To Operation Cancelled EX_POSING operation EX_POSING EX_POSING STEP EX_POSING STEP STEP STEP moving amount Motion command response EX_POSING Cancelled EX_POSING operation EX_POSING ZSET EX_POSING ZSET A machine coordinate system will be constructed where the axis stops after deceleration. Motion command response EX_POSING operation continues EX_POSING EX_POSING ZSET EX_POSING ZSET Motion command Motion command response Position control mode Speed control mode Cancelled EX_POSING operation EX_POSING EX_POSING VELO EX_POSING VELO VELO Motion command Motion command response
completed status.
mode will change from position control mode to speed control mode.
Motion command
Motion command