4 ) timing charts – Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 230
6.2 Motion Command Details
6.2.16 Read User Constant (PRM_RD)
6-69
Motion Commands
[ b ] Monitoring Parameters
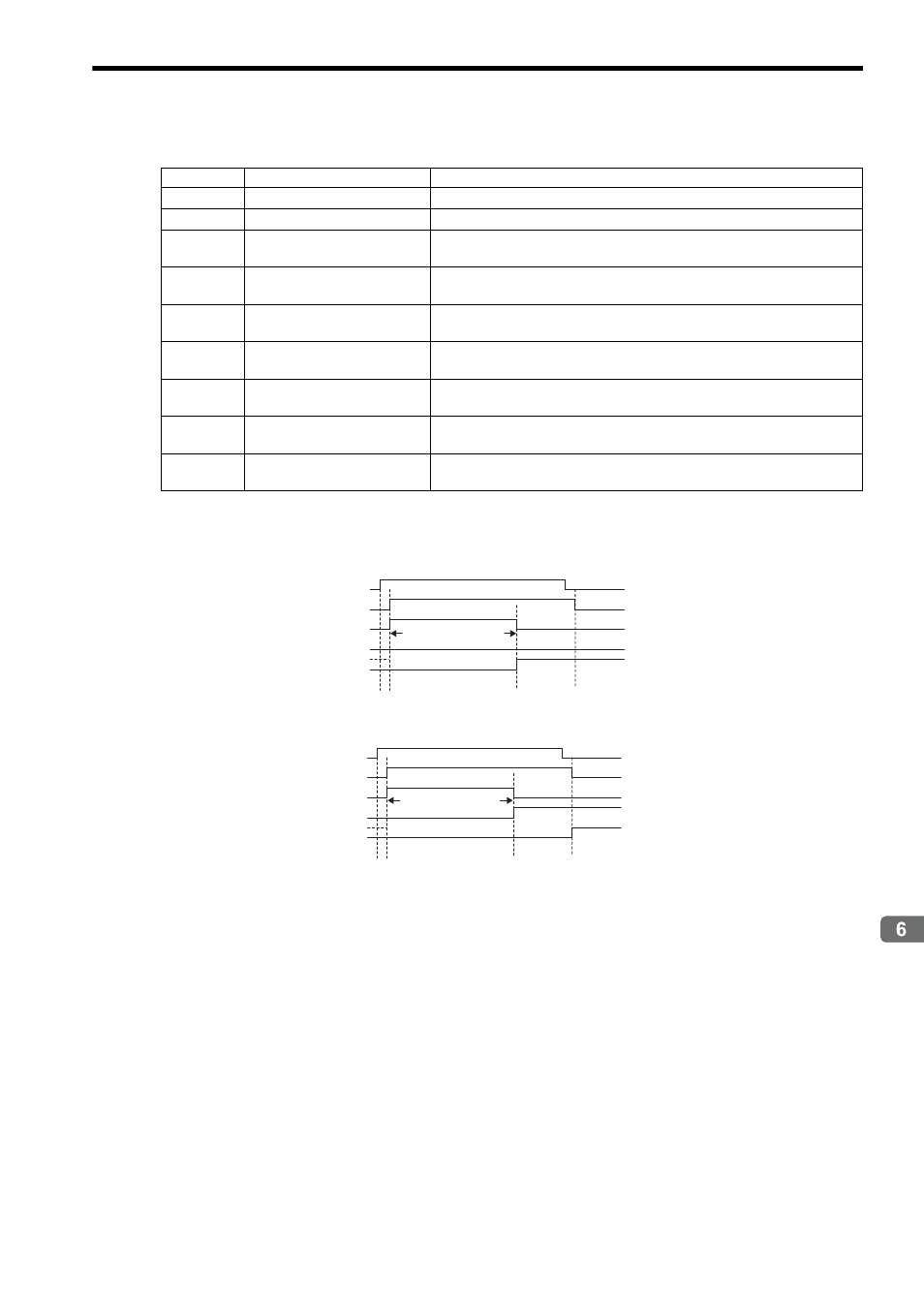
( 4 ) Timing Charts
[ a ] Normal End
[ b ] Error End
Parameter
Name
Monitor Contents
IL
02
Warning
Stores the most current warning.
IL
04
Alarm
Stores the most current alarm.
IW
08
Motion Command
Response Code
Indicates the motion command that is being executed.
The response code will be 17 during PRM_RD command execution.
IW
09
Bit 0
Command Execution Flag
Turns ON during PRM_RD command execution and turns OFF when execu-
tion has been completed.
IW
09
Bit 1
Command Hold Completed
Always OFF for PRM_RD command.
IW
09
Bit 3
Command Error Completed
Status
Turns ON if an error occurs during PRM_RD command execution. Turns OFF
when another command is executed.
IW
09
Bit 8
Command Execution
Completed
Turns ON when PRM_RD command execution has been completed.
IW
36
Servo Driver User Constant
No.
Stores the number of the SERVOPACK parameter that was read.
IL
38
Servo Driver User Constant
Reading Data
Stores the data of the SERVOPACK parameter that was read.
OW
08 = 17 (PRM-RD)
IW
08 = 17 (PRM-RD)
IW
09, bit 0 (BUSY)
IW
09, bit 8 (COMPLETE)
IW
09, bit 3 (FAIL)
Undefined length
of time
OW
08 = 17 (PRM-RD)
IW
08 = 17 (PRM-RD)
IW
09, bit 0 (BUSY)
IW
09, bit 8 (COMPLETE)
IW
09, bit 3 (FAIL)
Undefined length
of time