3 switching from zret – Yaskawa MP2000 Series: Built-in SVB or SVB-01 Motion Module User Manual
Page 284
7.2 Motions After Switching Motion Commands
7.2.3 Switching from ZRET
7-14
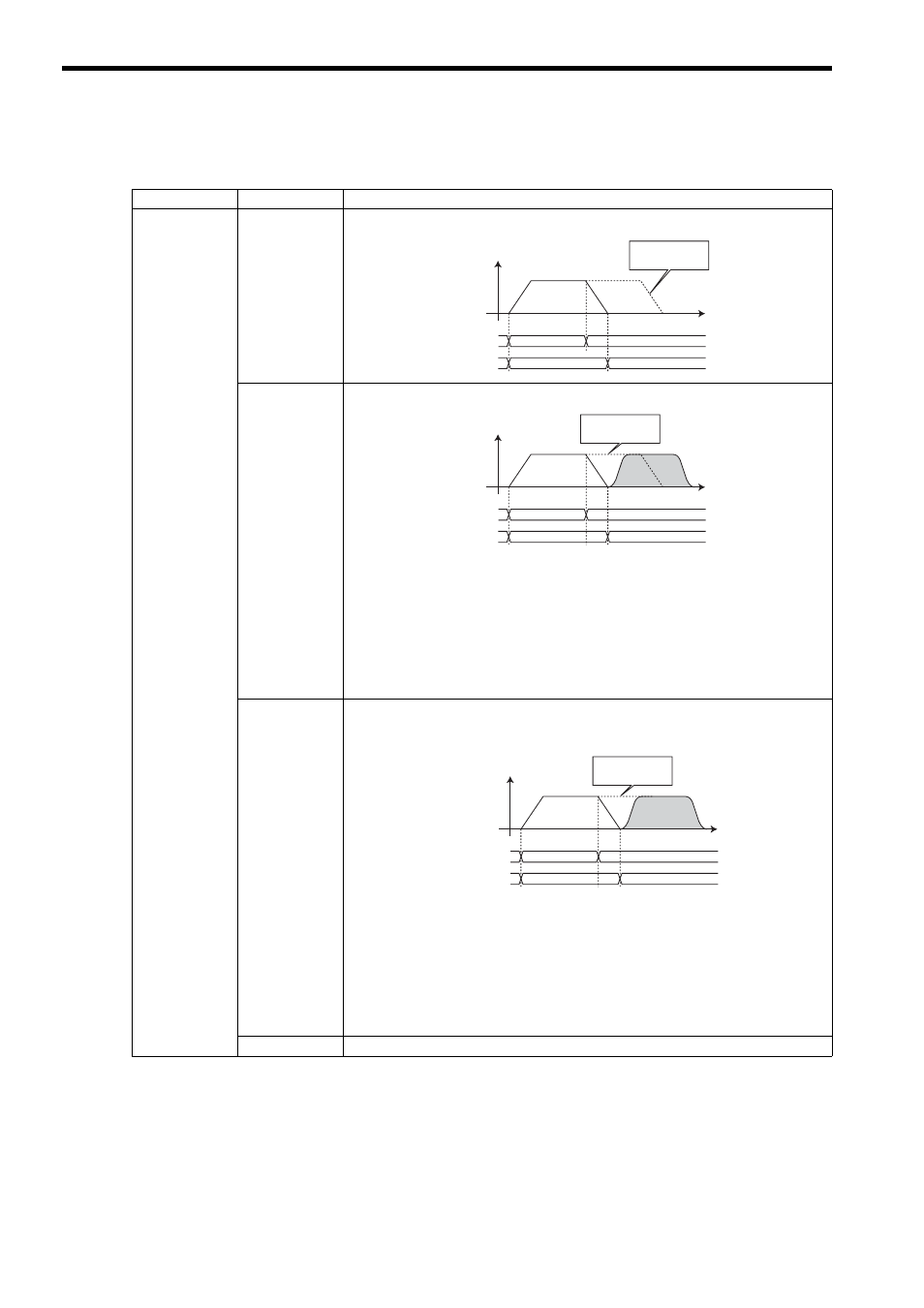
7.2.3 Switching from ZRET
Switched From
Switched To
Operation
ZRET
NOP
ZRET will be switched to NOP when the axis stops after deceleration.
POSING
ZRET will switch to POSING when the axis stops after deceleration.
1C) during Deceleration> • In Incremental Addition Mode (OW 09, bit 5 = 0) Any change in the Position Reference Setting (OL 1C) will be ignored. • In Absolute Mode (OW 09, bit 5 = 1) The value of the Position Reference Setting (OL 1C) when POSING execution starts will be the target position. Do not change the Position Reference Setting during deceleration unless it is EX_POSING ZRET will switch to EX_POSING when the axis stops after deceleration. 1C) during Deceleration> • In Incremental Addition Mode (OW 09, bit 5 = 0) Any change in the Position Reference Setting (OL 1C) will be ignored. • In Absolute Mode (OW 09, bit 5 = 1) The value of the Position Reference Setting (OL 1C) when EX_POSING execution starts will be the target position Do not change the Position Reference Setting during deceleration unless it is ZRET ZRET operation will continue. ZRET ZRET NOP ZRET NOP Cancelled Motion command Motion command response ZRET ZRET POSING ZRET POSING Cancelled POSING Motion command Motion command response ZRET ZRET EX_POSING ZRET EX_POSING EX_POSING Cancelled ZRET operation Motion command response
absolutely necessary.
When execution of EX_POSING is started, values are written to the related servo parame-
ters and then the positioning operation starts.
absolutely necessary.
ZRET operation
ZRET operation
Motion command