Motorola DSP56301 User Manual
Page 37
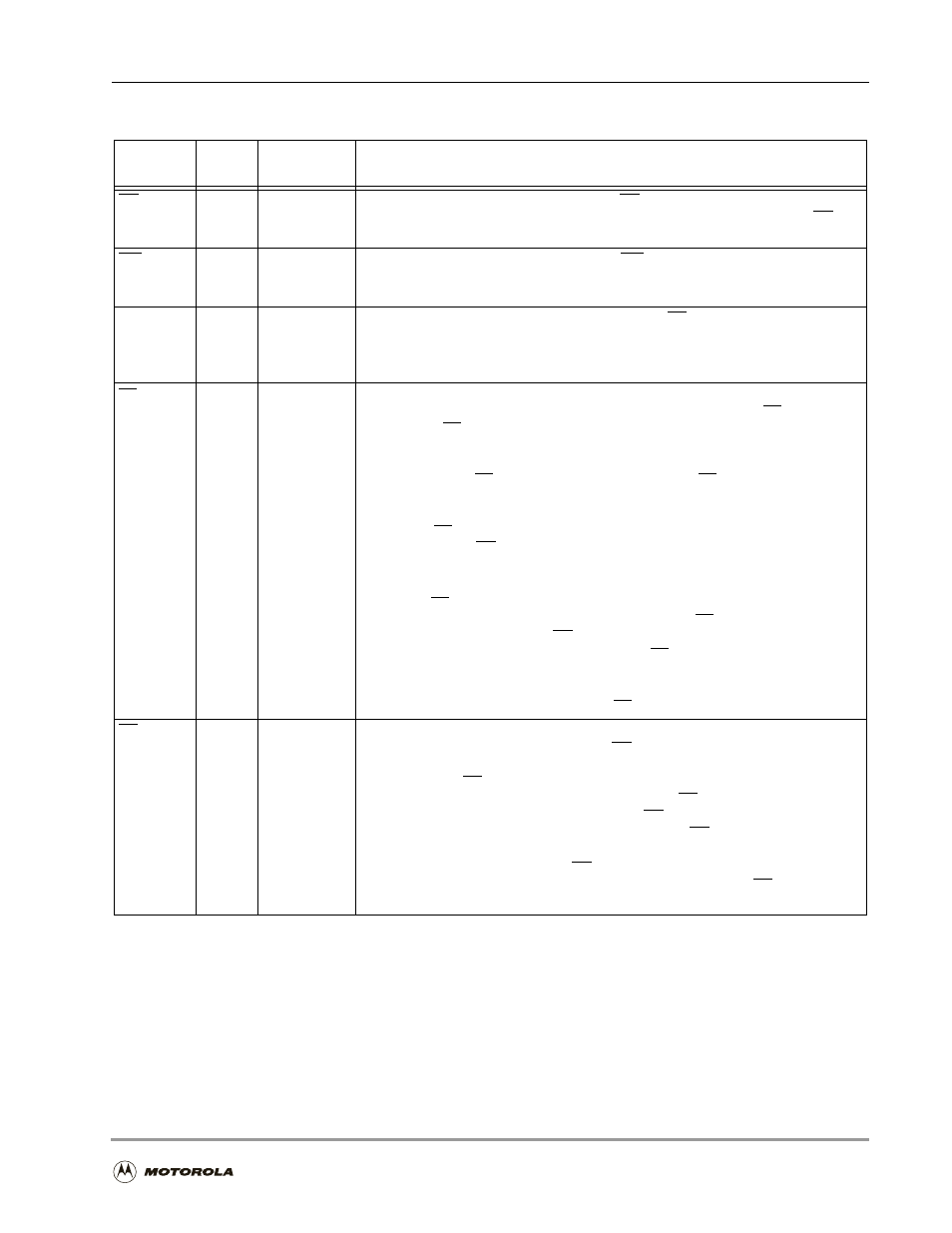
External Memory Expansion Port (Port A)
Signals/Connections
2
-7
RD
Output
Tri-stated
Read—When the DSP is the bus master, RD is an active-low output that is
asserted to read external memory on the data bus (D0–D23). Otherwise, RD is
tri-stated.
WR
Output
Tri-stated
Write—When the DSP is the bus master, WR is an active-low output that is
asserted to write external memory on the data bus (D0–D23). Otherwise, the
signals are tri-stated.
BS
Output
Tri-stated
Bus Strobe — When the DSP is the bus master, BS is asserted for half a clock
cycle at the start of a bus cycle to provide an “early bus start” signal for a bus
controller. If the external bus is not used during an instruction cycle, BS remains
deasserted until the next external bus cycle.
TA
Input
Ignored Input
Transfer Acknowledge—If the DSP56301 is the bus master and there is no
external bus activity, or the DSP56301 is not the bus master, the TA input is
ignored. The TA input is a data transfer acknowledge (DTACK) function that can
extend an external bus cycle indefinitely. Any number of wait states (1,
2. . .infinity) may be added to the wait states inserted by the bus control register
(BCR) by keeping TA deasserted. In typical operation, TA is deasserted at the
start of a bus cycle, is asserted to enable completion of the bus cycle, and is
deasserted before the next bus cycle. The current bus cycle completes one clock
period after TA is asserted synchronous to CLKOUT. The number of wait states is
determined by the
TA
input or by the BCR, whichever is longer. The BCR can be
used to set the minimum number of wait states in external bus cycles.
To use the TA functionality, the BCR must be programmed to at least one wait
state. A zero wait state access cannot be extended by TA deassertion; otherwise,
improper operation may result.
TA
can operate synchronously or asynchronously
depending on the setting of the OMR[TAS] bit. TA functionality must not be used
while DRAM accesses are performed; otherwise, improper operation may result.
Note: For operations that do not use the TA bus control function, pull this pin low.
BR
Output
Output
(deasserted)
Bus Request—Asserted when the DSP requests bus mastership and deasserted
when the DSP no longer needs the bus. BR is asserted or deasserted
independently of whether the DSP56301 is a bus master or a bus slave. Bus
“parking” allows BR to be deasserted even though the DSP56301 is the bus
master. (See the description of bus “parking” in the BB signal description.) The
bus request hold (BRH) bit in the BCR allows BR to be asserted under software
control even though the DSP does not need the bus. BR is typically sent to an
external bus arbitrator that controls the priority, parking, and tenure of each
master on the same external bus. BR is affected only by DSP requests for the
external bus, never for the internal bus. During hardware reset, BR is deasserted
and the arbitration is reset to the bus slave state.
Table 2-8. External Bus Control Signals (Continued)
Signal
Name
Type
State During
Reset
Signal Description