Servo off stop mode selection – Yaskawa Large Capacity Sigma II Series User Manual
Page 84
4 Parameter Settings and Functions
4.1.2 Setting the Overtravel Limit Function
4-8
Servo OFF Stop Mode Selection
The SGDH SERVOPACK turns OFF under the following conditions:
• The Servo ON input signal (/S-ON, CN1-40) is turned OFF.
• A Servo alarm occurs.
• Power is turned OFF.
Specify the Stop Mode if any of these occurs during operation.
Note: If the servomotor is stopped or rotating at extremely low speed when
the items above are set at 0 (dynamic brake status after stopping with
the dynamic brake), then braking power is not generated and the ser-
vomotor will stop the same as in coast status.
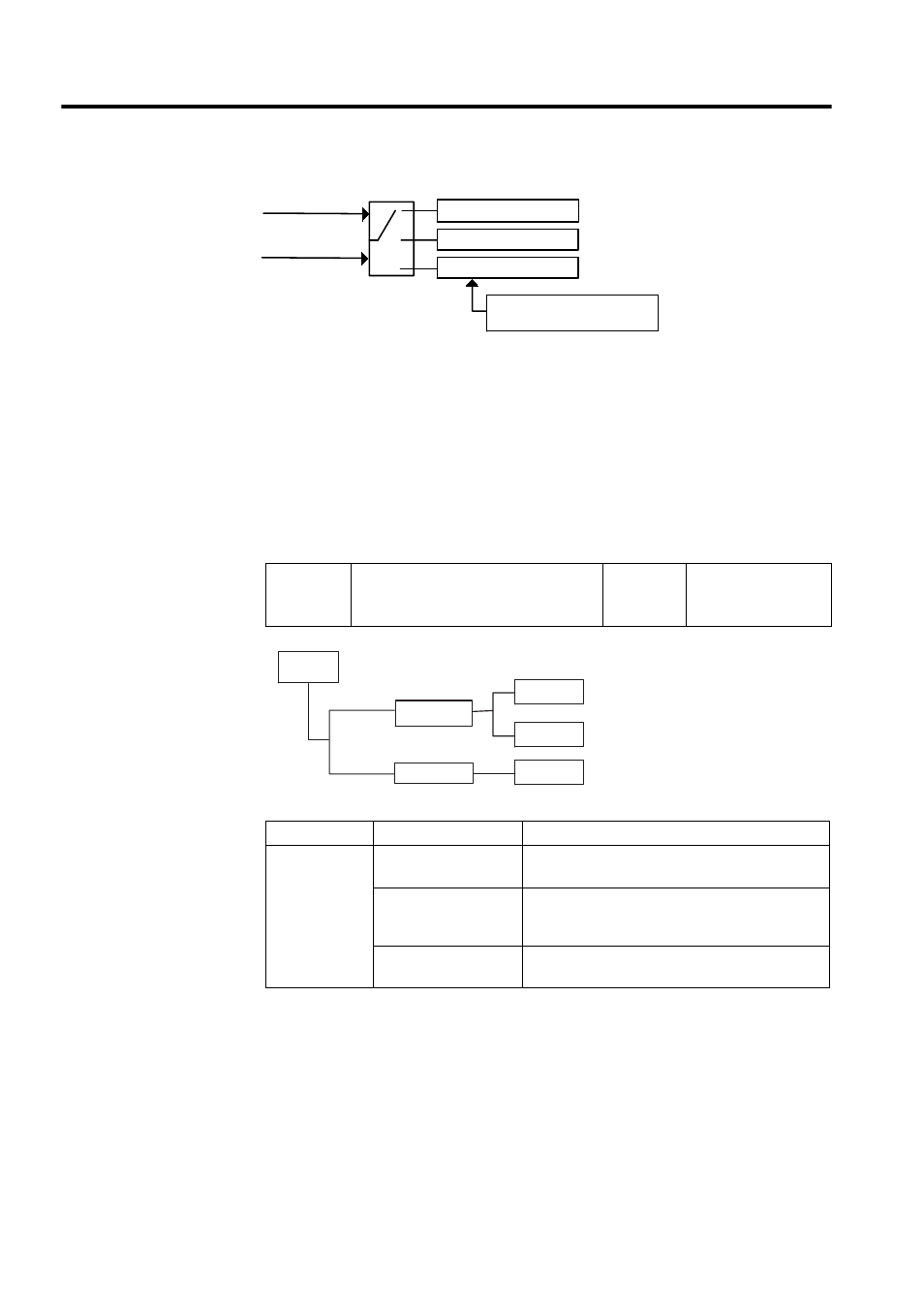
Pn001.0
Servo OFF or Alarm Stop Mode
Factory
Setting:
0
Parameter
Setting
Item
Pn001.0
0
(Factory setting)
Uses the dynamic brake to stop the servomotor.
Maintains dynamic brake after the servomotor stops.
1
Uses the dynamic brake to stop the servomotor.
Releases dynamic brake after the servomotor stops,
and the servomotor coasts to a stop.
2
Coasts the servomotor to a stop. The servomotor is
turned OFF and stops due to equipment friction.
Max. torque setting for an
emergency stop
Forward run
prohibit input
P-OT (CN1-42)
Reverse run
prohibit input
N-OT (CN1-43)
Stop Mode
Pn406
Stop by dynamic brake
Coast to a stop
Decelerate to a stop
Stop Mode
After stopping
Hold with
dynamic brake
0
1
Pn001.0=0
or 1
Servo
OFF
Pn001.0=2
The dynamic brake electrically applies a
brake by using a resistor to consume
servomotor rotation energy.
See 4.4.2 Using the Dynamic Brake.
Stop by dynamic
brake
Coast to a stop
Coast status
Coast status