Yaskawa Large Capacity Sigma II Series User Manual
Page 83
4.1 Settings According to Device Characteristics
4-7
4
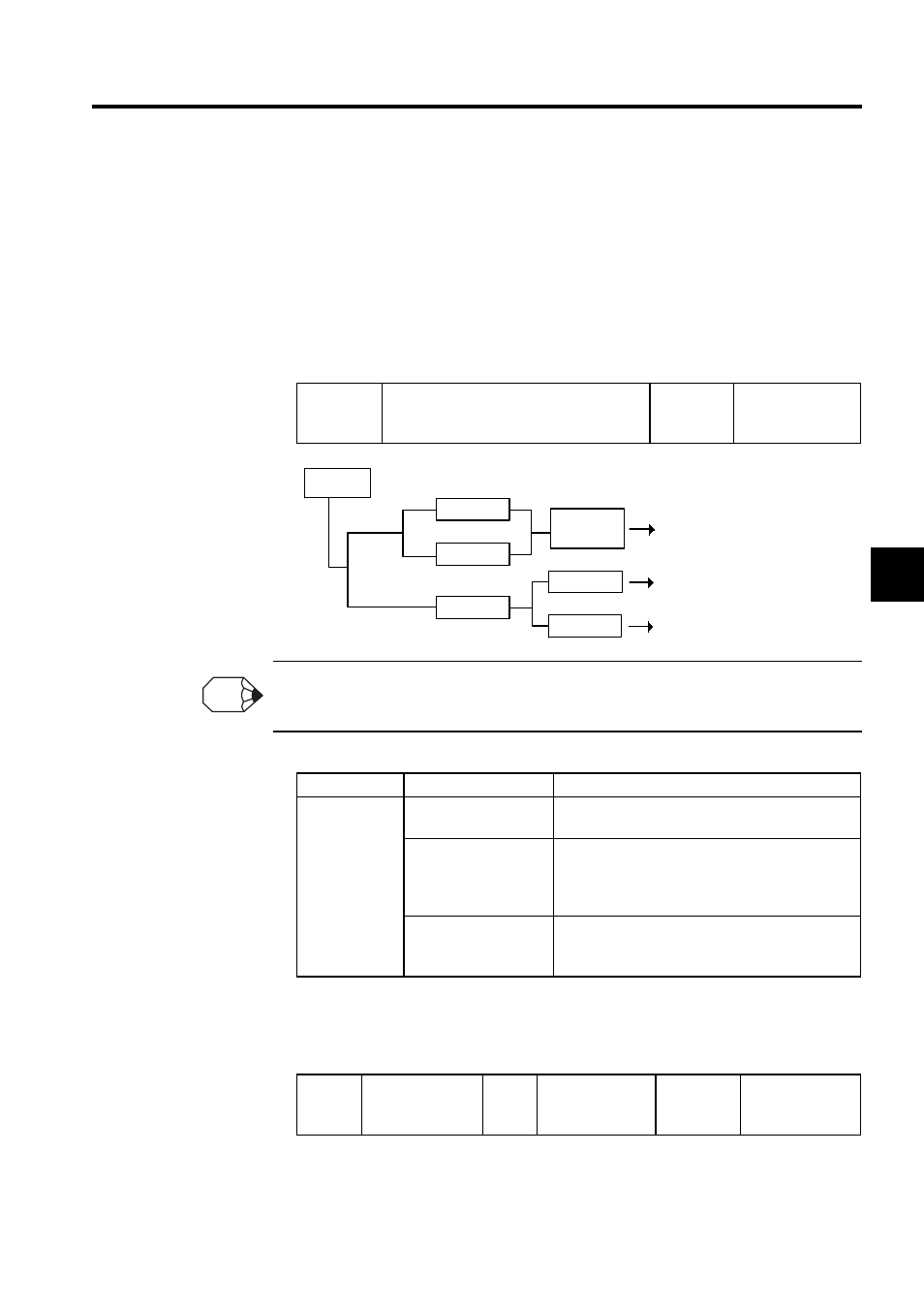
Servomotor Stop Mode for P-OT and N-OT Input Signals
Set the following parameters to specify the Servomotor Stop Mode when P-OT and N-OT
input signals are used.
Specify the Servomotor Stop Mode when either of the following signals is input during ser-
vomotor operation.
• Forward run prohibited input (P-OT, CN1-42)
• Reverse run prohibited input (N-OT, CN1-43)
For torque control, the servomotor will be placed in coast status after either decelerating or coasting to
a stop (according to the stop mode set in Pn001.0), regardless of the setting of Pn001.1.
Pn406 specifies the stop torque applied for overtravel when the input signal for prohibiting
forward or reverse rotation is used.
The torque limit is specified as a percentage of rated torque.
Pn001.1
Overtravel Stop Mode
Factory
Setting:
0
Speed/Torque
Control,
Position Control
Parameter
Setting
Item
Pn001.1
0
Stops the servomotor the same way as turning the
servo OFF (according to Pn001.0).
1
Decelerates the servomotor to a stop at the preset
torque, and then locks the servomotor in Zero Clamp
Mode.
Torque setting: Pn406 emergency stop torque
2
Decelerates the servomotor to a stop at the preset
torque, and puts the servomotor in coast status.
Torque setting: Pn406 emergency stop torque
Pn406
Emergency Stop
Torque
Unit:
%
Setting Range:
0 to Max. Torque
Factory
Setting:
800
Valid when
Pn001.1 is 1 or 2
Stop by dynamic
brake
Coast to a stop
Decelerate to a
stop
Zero clamp
Coast status
Coast
status
Pn001.1
setting
Stop Mode
After stopping
Pn001.1= 1 or 2
Pn001.0= 0, 1
Pn001.1= 0
0
1
2
2
Overtravel
INFO