2 using feed-forward control, 3 using proportional control – Yaskawa Large Capacity Sigma II Series User Manual
Page 191
5 Servo Adjustment
5.2.2 Using Feed-forward Control
5-8
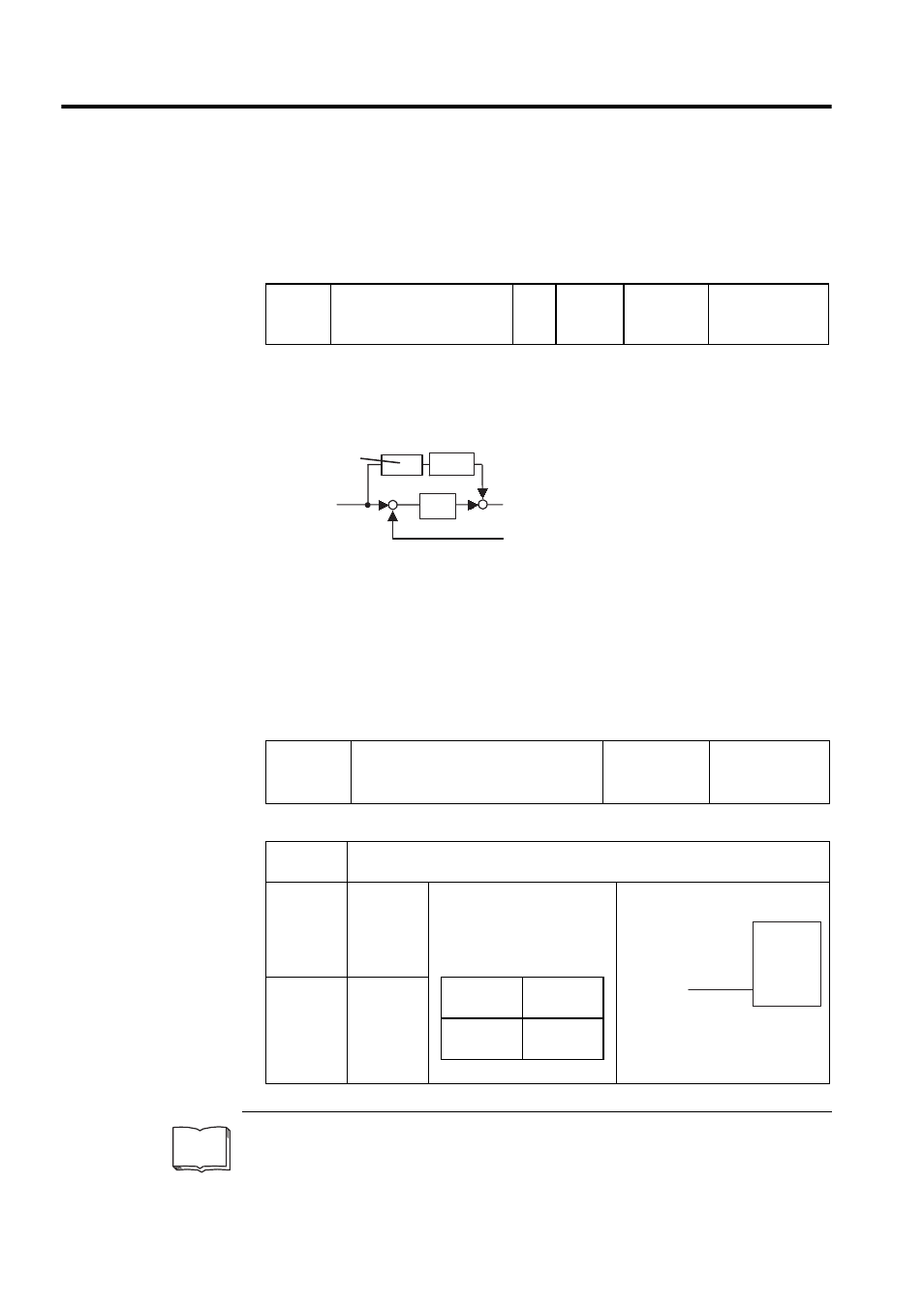
5.2.2 Using Feed-forward Control
The time required for positioning can be shortened with feed-forward control
1
by setting the
following parameter.
This parameter is set to apply feed-forward frequency compensation to position control
inside the SERVOPACK. Use this parameter to shorten positioning time. Too high a value
may cause the machine to vibrate. For ordinary machines, set 80% or less in this constant.
5.2.3 Using Proportional Control
If parameter Pn000.1 is set to 0 or 1 as shown below, input signal /P-CON serves as a PI/P
control changeover switch.
• PI control: Proportional/integral control.
• P control: Proportional Control
1
Feed-forward control
Feed-forward control is a type of control in which necessary control connections are made in advance
before the control system is affected by external disturbance. Feed-forward control increases the
effective servo gain, thus making it possible to improve the response performance of the system.
Pn109
Feed-forward
Unit:
%
Setting
Range:
0 to 100
Factory
Setting:
0
Position Control
TERMS
Reference pulse
Feedback pulse
Difference
+
+ +
-
Kp
Pn109
Pn000.1
Control Method Selection
Factory
Setting:
0
Speed/Position
Control
Pn000.1
Setting
Control Mode
0
Speed
Control
Usual speed control or position
control is selected.
Input signal /P-CON (CN1-41)
is used to select PI control or P
control.
1
Position
Control
CN1-41 is
open.
PI control
CN1-41 is
0 V.
P control
SERVOPACK
/P-CON
P or PI
control
selection
CN1-41
selection