2 position control by host controller – Yaskawa Large Capacity Sigma II Series User Manual
Page 74
3.2 Supplementary Information on Trial Operation
3-11
3
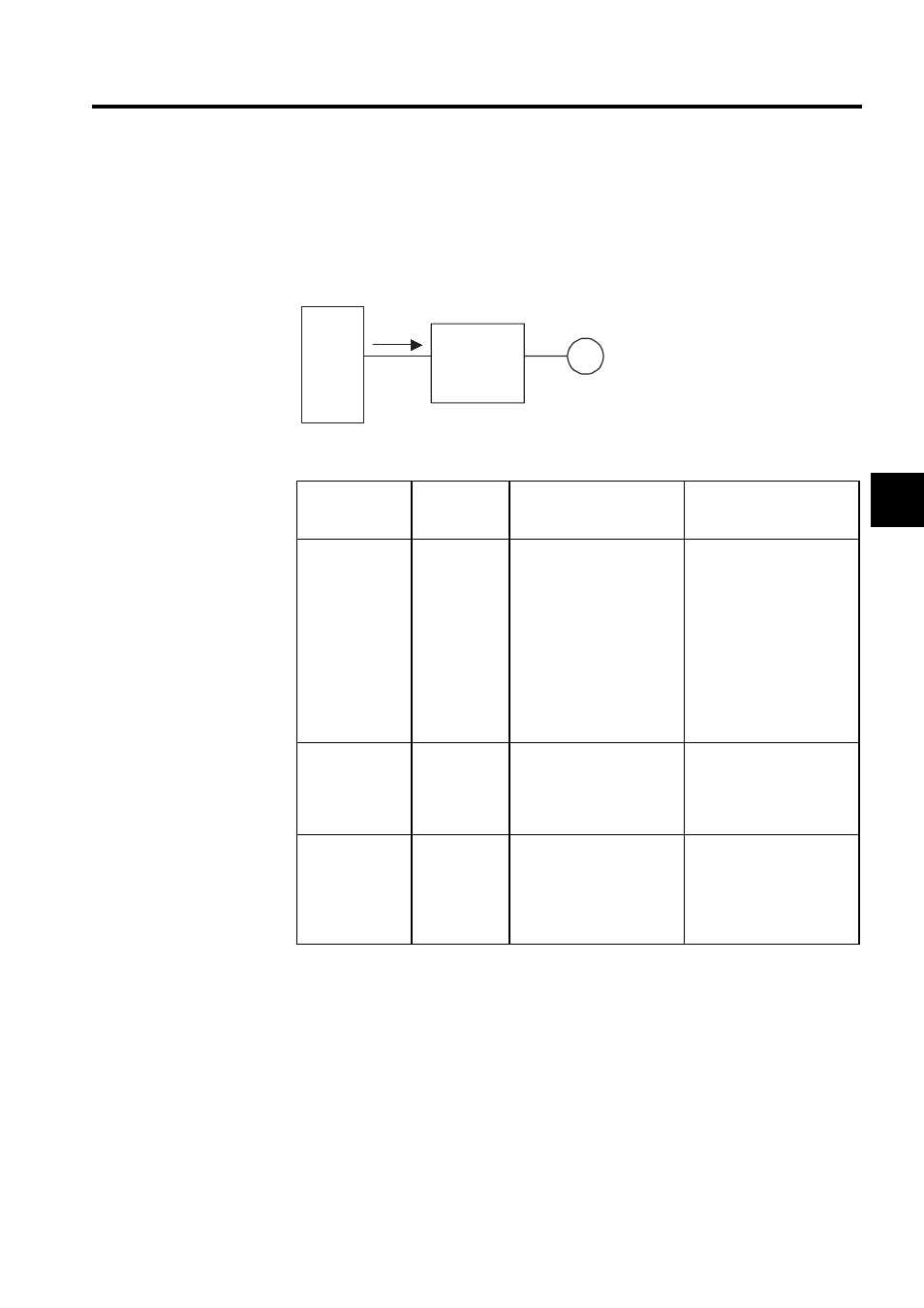
3.2.2 Position Control by Host Controller
If position control from the host controller has not been confirmed, disconnect the servomo-
tor from the equipment and perform a trial operation, otherwise the servomotor may run out
of control. Check servomotor operation as described in the following table.
Reference from
the Host Con-
troller
Check Item
Check Method
Review Items
JOG Operation
(Constant Refer-
ence Speed In-
put from Host
Controller)
Motor speed
Check motor speed as fol-
lows:
• Use the speed monitor
(Un000) on the Panel
Operator.
• Run the servomotor at low
speed. Input a reference
speed of 60 min
-1
for
example to check to see if
the servomotor makes one
revolution per second.
Check the parameter setting
at Pn300 to see if reference
speed gain is correct.
Simple Position-
ing
No. of motor
rotations
Input a reference equivalent
to one servomotor rotation
and visually check to see if
the shaft makes one revolu-
tion.
Check the parameter setting
at Pn201 to see if the number
of dividing pulses is correct.
Overtravel
(P-OT and N-OT
Used)
Whether the
servomotor
stops rotating
when P-OT
and N-OT sig-
nals are input
Check to see if the servomo-
tor stops when P-OT and N-
OT signals are input during
continuous servomotor oper-
ation.
Review P-OT and N-OT
wiring if the servomotor
does not stop.
Trial operation for
servomotor without load
M
Host
controller
Position control
Speed control
Reference
speed
SGDH
SERVOPACK