9 handling power loss – Yaskawa Large Capacity Sigma II Series User Manual
Page 157
4.5 Forming a Protective Sequence
4-81
4
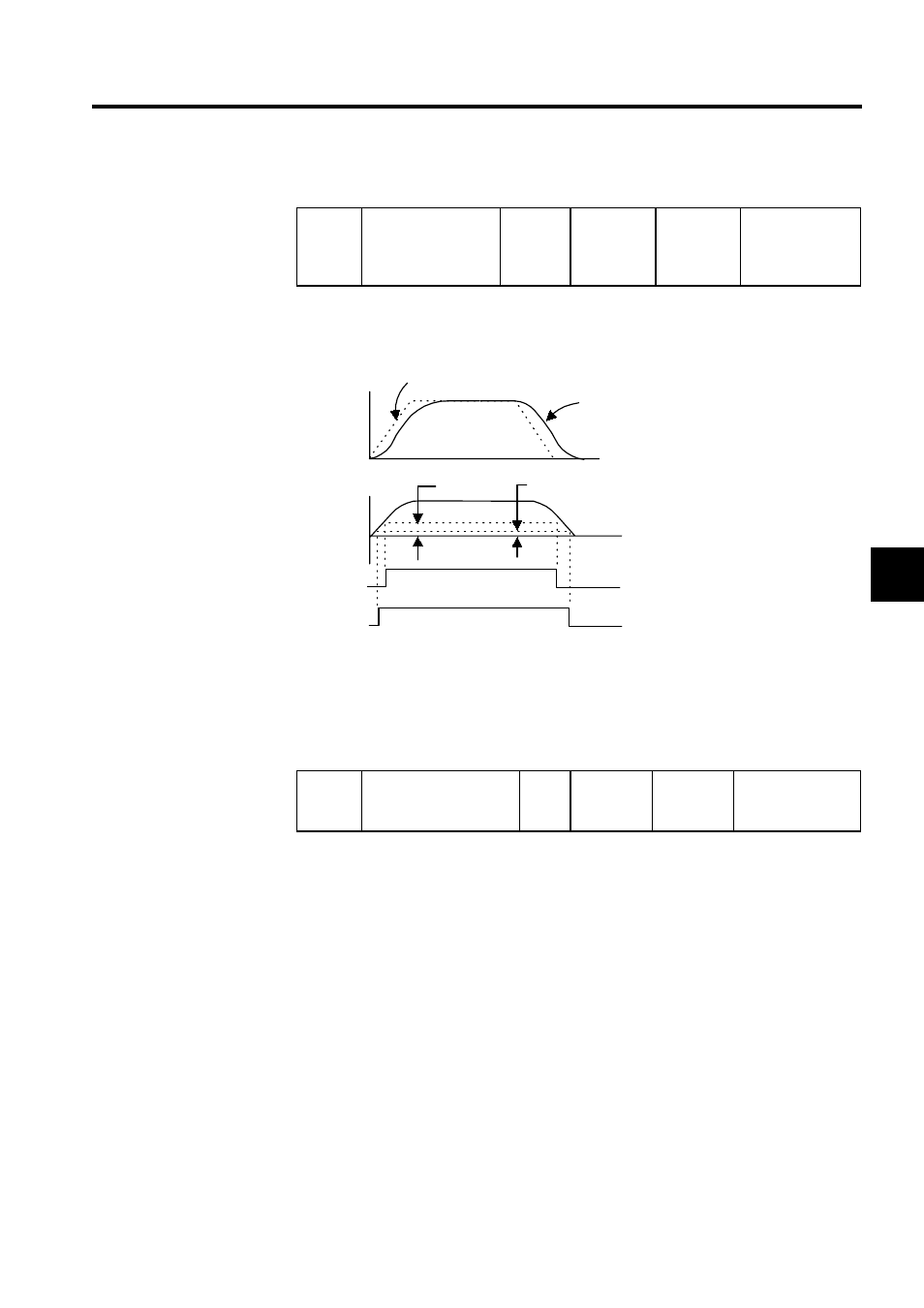
The following parameter is used to set the timing for /NEAR signal output.
Generally set the near signal width higher than the positioning completed width. Also see
4.5.3 Using the Positioning Completed Output Signal.
4.5.9 Handling Power Loss
The following parameter is used to specify whether the servomotor holds or continues when
a power loss occurs.
The SERVOPACK turns the servomotor OFF if it detects an instantaneous voltage drop in
the power supply. This factory setting of 20 ms means that servomotor operation will con-
tinue if power is lost for less than 20 ms.
In the following instances, however, a Servo alarm is generated or control is lost (equivalent
to normal power OFF operation) regardless of the parameter setting.
• When an insufficient voltage alarm (A.41) occurs during power loss with a large servo-
motor load.
• When control is lost (equivalent to normal power OFF operation) with loss of the control
power supply.
In power loss detection, the status of the main circuit power supply is detected and OFF sta-
tus is ignored so servomotor operation will continue if the servomotor turns back ON within
the time set at parameter Pn509.
Pn504
NEAR Signal Width
Unit:
refer-
ence
units
Setting
Range:
1 to 250
Factory
Setting:
7
Position Control
/NEAR
/COIN
Pn504
Pn500
0
Speed
Reference
Servomotor
Error pulse
Pn509
Momentary Hold Time
Unit:
ms
Setting
Range:
20 to 1000
Factory
Setting:
20
Speed/Torque
Control,
Position Control