2 using the dynamic brake, Important – Yaskawa Large Capacity Sigma II Series User Manual
Page 139
4.4 Setting Stop Functions
4-63
4
4.4.2 Using the Dynamic Brake
To stop the servomotor by applying the dynamic brake (DB)
1
, set the desired mode in the
following parameter. The servomotor will stop due to equipment friction if the dynamic
brake is not applied.
The SGDH SERVOPACK turns OFF under the following conditions:
• The Servo ON input signal (/S-ON, CN1-40) is turned OFF.
• A Servo alarm occurs.
• Main power is turned OFF.
Specify the Stop Mode if any of these occurs during operation.
* If the servomotor is stopped or moving at extremely low speed, it will
coast to a stop.
The dynamic brake is an emergency stop function. Do not repeatedly start and stop the servomotor
using the servo ON signal (/S-ON) or by repeatedly turning power ON and OFF. Frequently turning
power ON and OFF causes internal elements of the SERVOPACK to deteriorate, resulting in
unexpected problems.
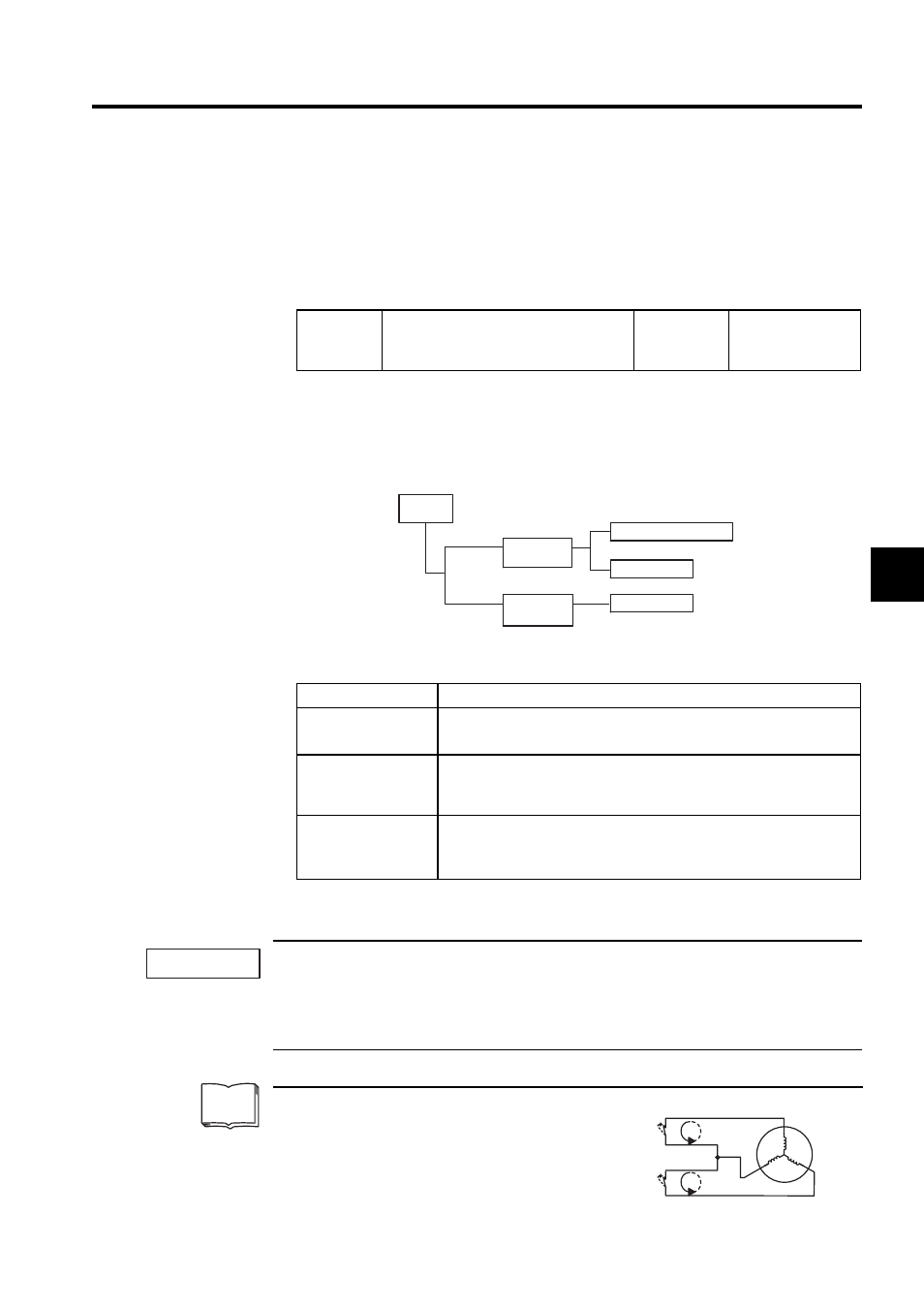
1
Dynamic brake (DB)
The dynamic brake is a common way of suddenly stopping a
servomotor. Built into the SERVOPACK, the dynamic brake
suddenly stops a servomotor by electrically shorting its elec-
trical circuit.
Pn001.0
Servo OFF or Alarm Stop Mode
Factory
Setting:
0
Speed/Torque
Control,
Position Control
Pn001.0 Setting
Description
0
Uses the dynamic brake to stop the servomotor.
Maintains dynamic brake after the servomotor stops.
*
1
Uses the dynamic brake to stop the servomotor.
Releases dynamic brake after the servomotor stops, and the servomotor
coasts to a stop.
2
Coasts the servomotor to a stop.
The servomotor is turned OFF and motion stops due to equipment fric-
tion.
Servomotor
SERVOPACK
TERMS
Stop mode
After stopping
Coast to
a stop
Dynamic
brake stop
Hold dynamic brake
Coast status
0
1
Pn001.0
= 0 or 1
Servo
OFF
Pn001.0
= 2
Coast status
IMPORTANT