2 selecting servopacks, Sgdh - 2b d e – Yaskawa Large Capacity Sigma II Series User Manual
Page 284
7 Servo Selection and Data Sheets
7.1.2 Selecting SERVOPACKs
7-8
* 1. Moment of inertia J for table W (load mass) can be calculated with the Sizing Software.
Moment of inertia J for the servomotor is calculated automatically with the Sizing Software.
* 2. Gear ratio R = N
M
/N
L
= Motor speed/load-end speed
* 3. Gear + coupling Jg: Gear or coupling moment of inertia. This is the moment of inertia for cou-
pling between the servomotor and the load (machine).
7.1.2 Selecting SERVOPACKs
The following section describes SERVOPACK models and applicable servomotors.
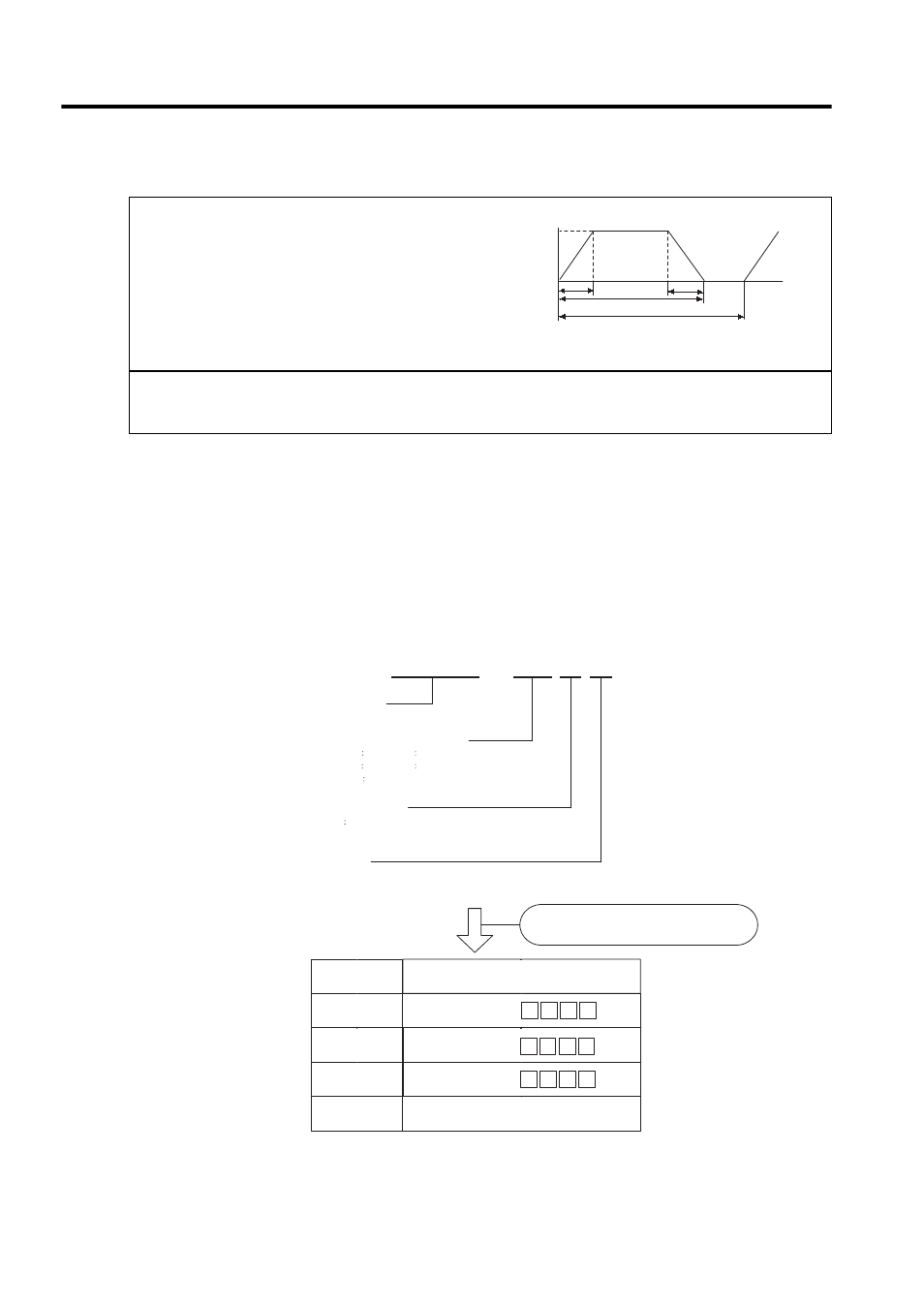
Duty Cycle
Duty
t c
s
Positioning distance
Ls
mm
Slide speed
V
L
m/min
Positioning time
t s
s
Accel/decel time
t a
s
Enter either V
L
or ts. Specify the priority if both are entered.
Operating environment
Ambient temperature
Others
Table 7.1 Machine Data Table (cont’d)
V
L
tc
ta
ts
ta
Ls
Selected SERVOPACK Model
Example
Axis 1
Axis 2
x
x x
x
x x x x x
SGDH-
2
SGDH-
B D E
SGDH-
Flowchart for SERVOPACK selection
SGDH - 2B D E
Σ-II Series
SGDH SERVOPACK
Rated Output (motor capacity)
2B 22 kW 4E 45 kW
3Z 30 kW 5E 55 kW
3G 37 kW
Supply Voltage
D 400 V
Model
E: For speed/torque control and position control