3 using the zero clamp function, Parameter setting – Yaskawa Large Capacity Sigma II Series User Manual
Page 140
4 Parameter Settings and Functions
4.4.3 Using the Zero Clamp Function
4-64
4.4.3 Using the Zero Clamp Function
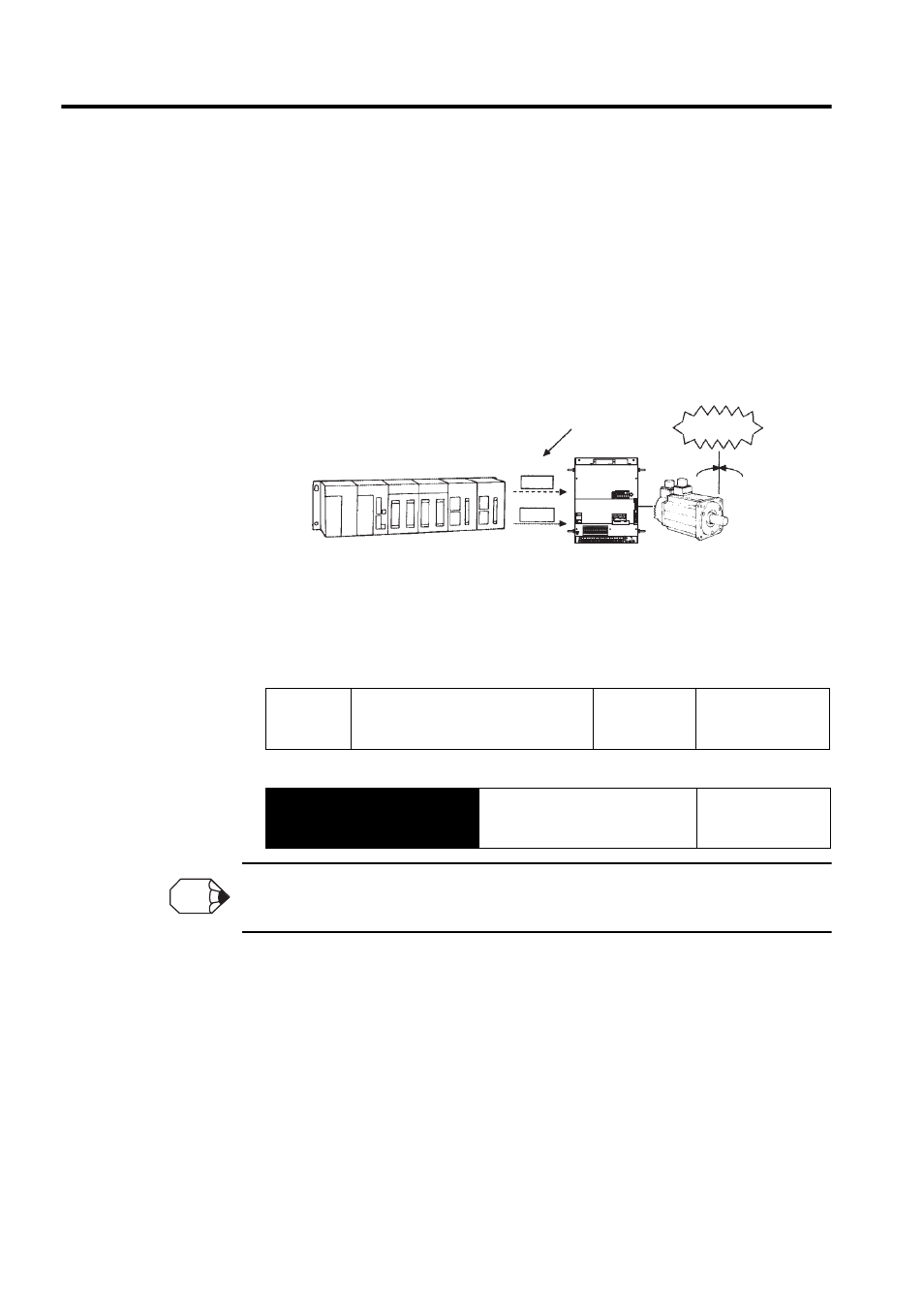
The zero clamp function is used for systems where the host controller does not form a posi-
tion loop for the speed reference input.
In other words, this function is used to stop and lock the servomotor even when the input
voltage of speed reference V-REF is not 0 V. An internal position loop is temporarily formed
to clamp the servomotor within one pulse when the zero clamp function is turned ON. Even
if the servomotor is forcibly rotated by external force, it will still return to the zero clamp
position.
Parameter Setting
Set the following parameter so that the input signal /P-CON (/ZCLAMP) can be used to
enable or disable the zero clamp function.
The /ZCLAMP signal can be used when an input circuit signal is allocated. See
4.3.3 Input Circuit
Signal Allocation.
Pn000.1
Control Method Selection
Factory
Setting:
0
Speed Control
→ Input /P-CON CN1-41
Proportional Control, etc.
Speed/Torque
Control,
Position Control
Host controller
Speed reference
A speed reference below the
Pn501 setting is ignored.
!
/P-CON
(/ZCLAMP)
V-REF
WARNING
5
electric shock.
Disconnect all power
May cause
before servicing.
and wait 5 min.
grounding techniques.
Use proper
Stops
precisely.
INFO