2 jog speed, 3 input circuit signal allocation – Yaskawa Large Capacity Sigma II Series User Manual
Page 129
4.3 Setting Up the SERVOPACK
4-53
4
4.3.2 JOG Speed
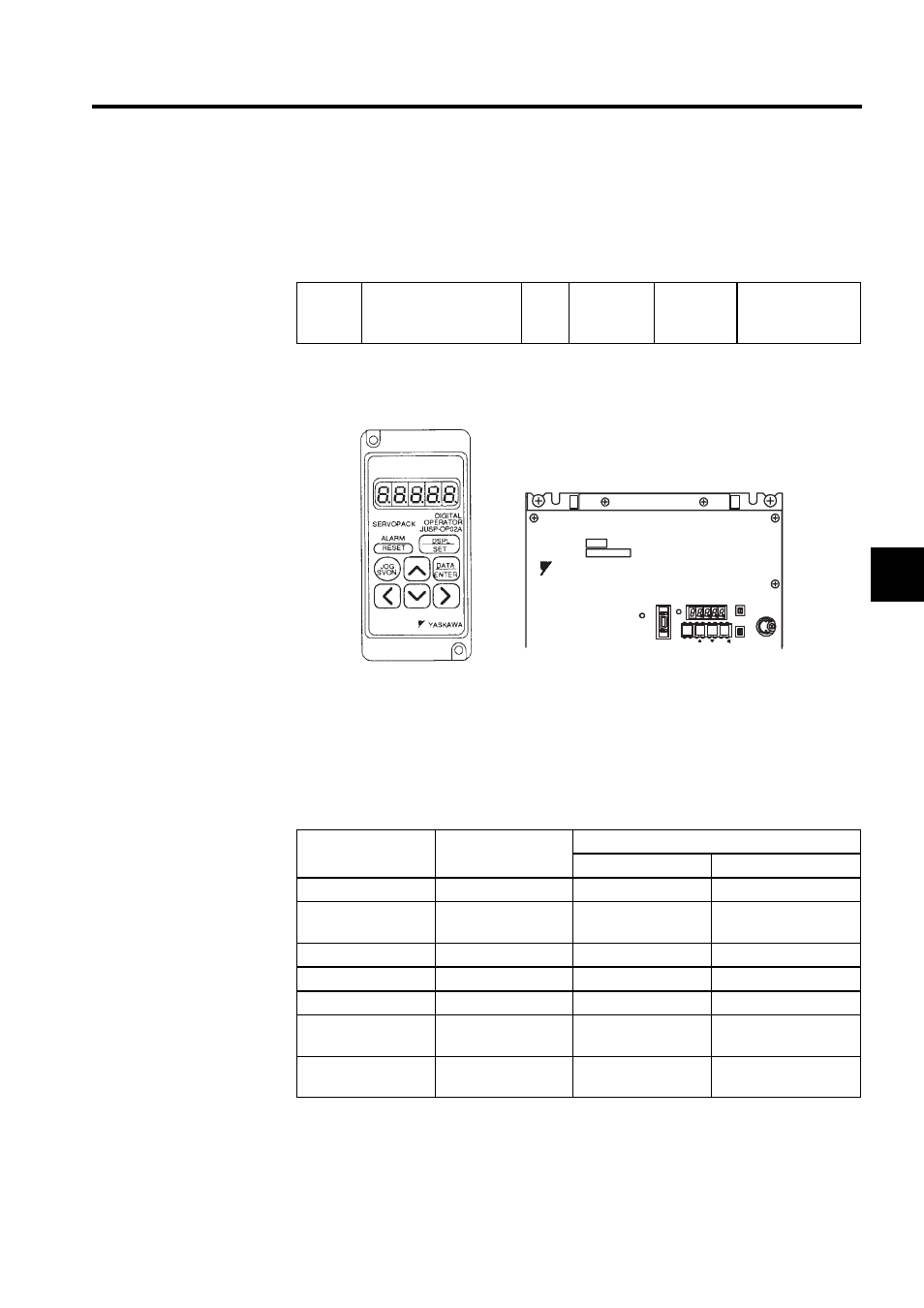
Use the following parameter to set or modify motor speed when operating the servomotor
from a Panel or Digital Operator.
Use this parameter to set the motor speed when operating the SERVOPACK from a Panel or
Digital Operator. If the setting is higher than the maximum motor speed of the servomotor,
then the servomotor will rotate at its maximum speed.
4.3.3 Input Circuit Signal Allocation
The functions allocated to sequence input signal circuits can be changed. CN1 connector
input signals are allocated with the factory settings as shown in the following table.
* The functions of these input signals are automatically switched according
to the setting at parameter Pn000.1 as long as Pn50A.0 is set to 0.
Pn304
Jog Speed
Unit:
min
-1
Setting
Range:
0 to 10000
Factory
Setting:
500
Speed/Torqque
Control,
Position Control
Digital Operator
Panel Operator
CN8
BATTERY
Ver.
CHARGE
MODE/SET
YASKAWA
SERVOPACK 400V
SGDH-
DATE/
POWER
CN5
CN1 Connector Ter-
minal Numbers
Input Terminal
Name
Factory Setting
Symbol
Name
40
SI0
/S-ON
Servo ON
41
SI1.
/P-CON
(Proportional control
reference) *
42
SI2
P-OT
Forward run prohibited
43
SI3
N-OT
Reverse run prohibited
44
SI4
/ALM-RST
Alarm reset
45
SI5
/P-CL
(Forward current limit)
*
46
SI6
/N-CL
(Reverse current limit)
*