4 servo gain adjustments, 1 servo gain parameters, 2 basic rules of gain adjustment – Yaskawa Large Capacity Sigma II Series User Manual
Page 210
5.4 Servo Gain Adjustments
5-27
5
5.4 Servo Gain Adjustments
This section describes information on the basic rules of gain adjustments in the SERVOPACK,
adjustment methods in a variety of cases, and reference set values.
5.4.1 Servo Gain Parameters
The following parameters must be set properly for servo gain adjustments.
• Pn100: Speed loop gain
• Pn101: Speed loop integral time constant
• Pn102: Position loop gain
• Pn401: Torque reference filter time constant
If the SERVOPACK is used in the speed control mode with the analog voltage reference, the
position loop is controlled by the host device. Therefore, position loop gain is adjusted
through the host device.
If the host is not available for adjustments of position loop gain, set the speed reference input
gain in parameter Pn300. If the set value is improper, the servomotor may not run at top
speed.
5.4.2 Basic Rules of Gain Adjustment
The servo system consists of three feedback loops (i.e., position loop, speed loop, and cur-
rent loop). The innermost loop must have the highest response speed and the middle loop
must have higher response speed than the outermost. If this principle is not followed, it will
result in vibration or poor responsiveness.
The SERVOPACK is designed to ensure that the current loop has good response perfor-
mance. The user need only adjust position loop and speed loop gain.
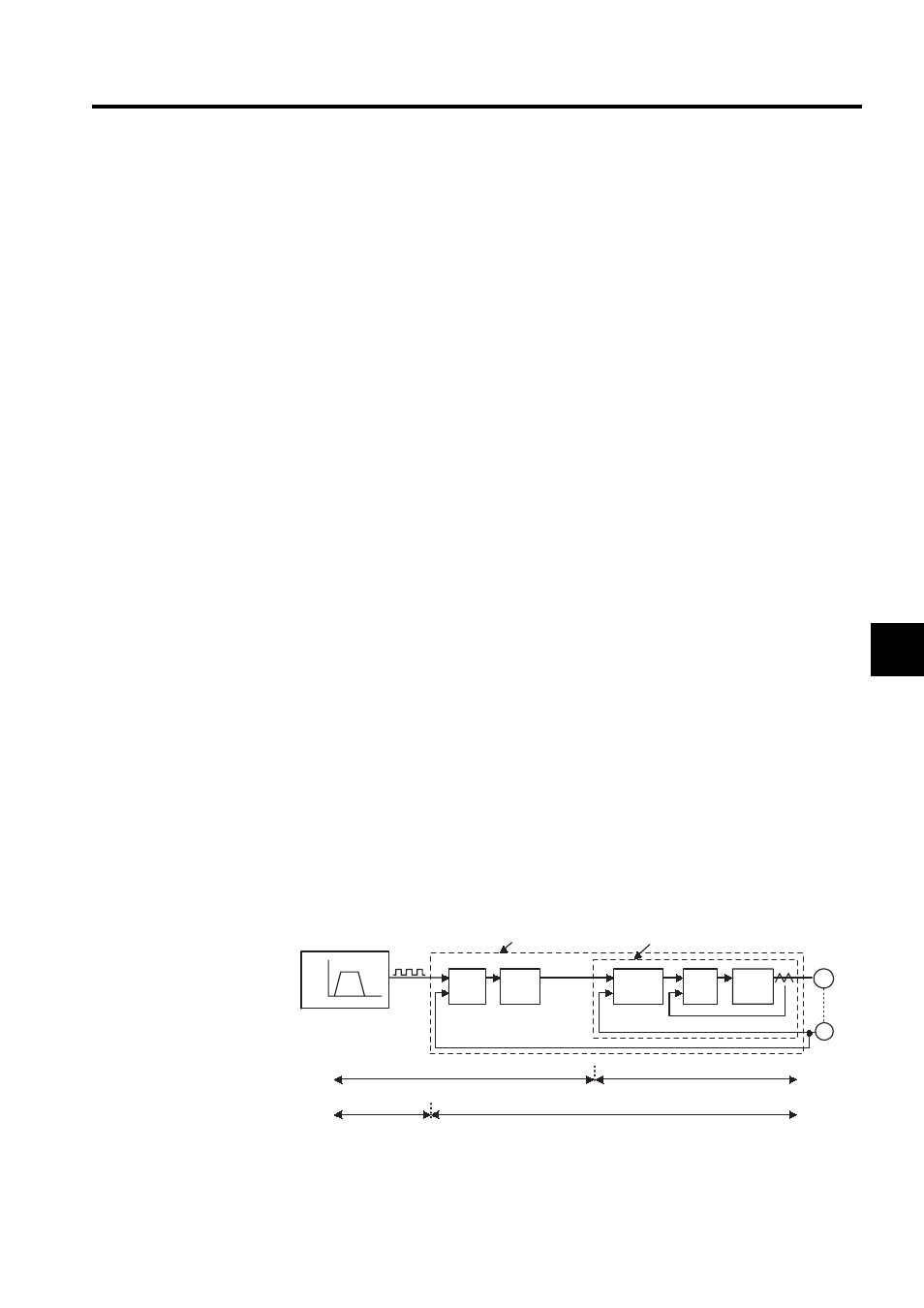
The servo system block diagram consists of the position, speed, and current loops, as shown
below.
Fig. 5.1 Servo System Block Diagram
In case of position control
In case of speed control
Speed
Speed pattern
Time
Pulse
train
Error
counter
KP (D/A
convert-
er)
Analog
voltage
Speed kv
control
block Ti
+
Current
limit
block
Power
conver-
sionblock
Motor
Encoder
SM
PG
Position loop
Speed control mode
Position control mode
Host controller (prepared by the user)
SERVOPACK
Host controller
(prepared by the user)
KP: Position loop gain
Kv: Speed loop gain
Ti: Integral time constant
SERVOPACK
Speed loop
Current loop
-
+
-
+
-