4 setting speed bias, Methods for using proportional control – Yaskawa Large Capacity Sigma II Series User Manual
Page 192
5.2 High-speed Positioning
5-9
5
Methods for Using Proportional Control
Proportional control can be used in the following two ways.
• When operation is performed by sending speed references from the host controller to the
SERVOPACK, the host controller can selectively use P control mode for particular con-
ditions only. This method can suppress overshooting and shorten setting time. Refer to
5.2.5 Using Mode Switch for particular conditions.
• If PI control mode is used when the speed reference has a reference offset, the motor
may rotate at a very slow speed and fail to stop even if 0 is specified as a speed refer-
ence. In this case, use P control mode to stop the motor.
5.2.4 Setting Speed Bias
The setting time for positioning can be reduced by assigning bias to the speed reference
block in the SERVOPACK. To assign bias, use the following parameters.
Set the parameters to shorten the time required for positioning according to the application.
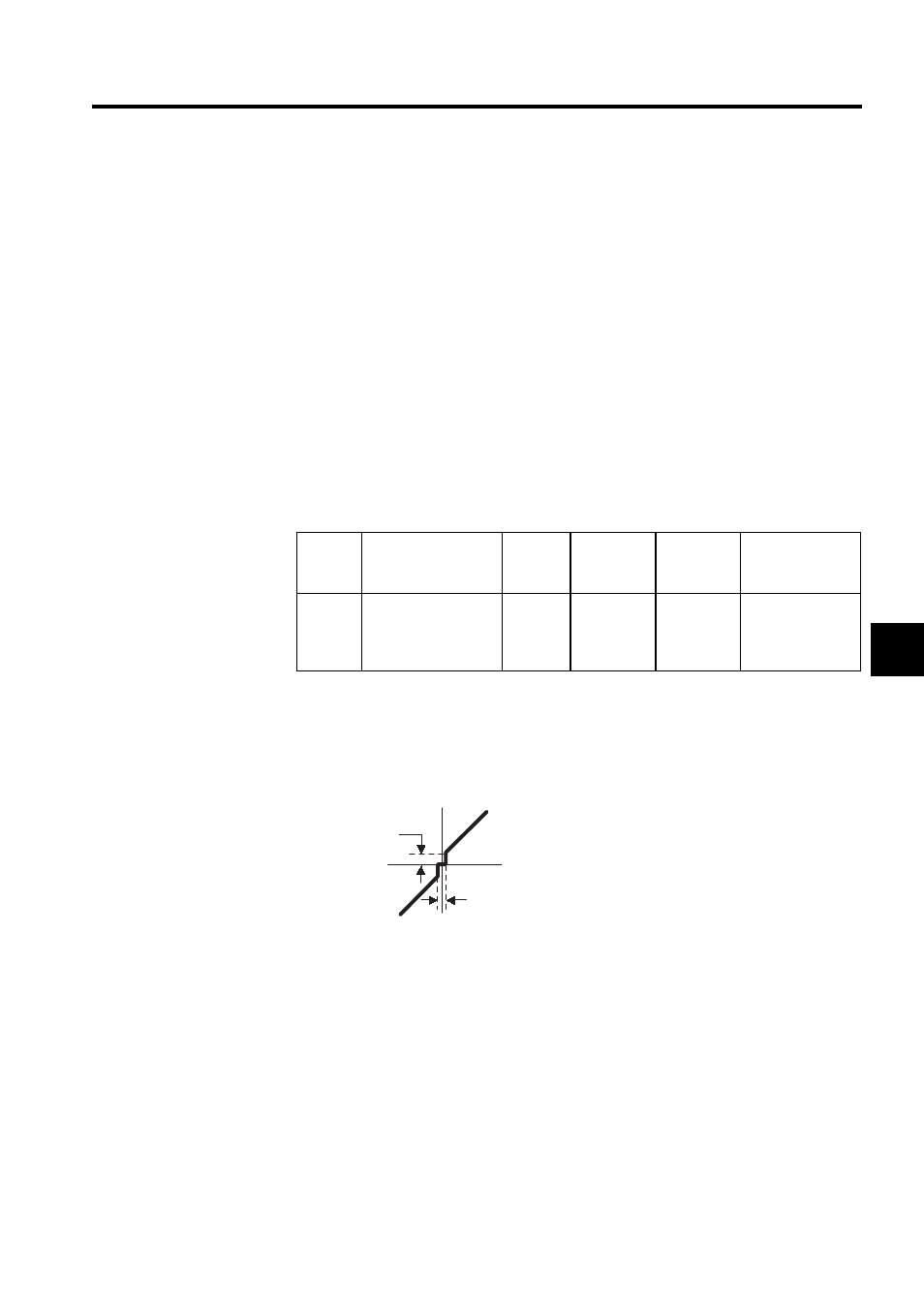
The bias increment width (Pn108) is expressed by an error pulse width that determine the
timing of giving bias input (Pn107). The bias input is ON if the error pulse width exceeds the
value set in Pn108.
Pn107
Bias
Unit:
min
-1
Setting
Range:
0 to 450
Factory
Setting:
0
Position Control
Pn108
Bias Addition Width
Unit:
refer-
ence
units
Setting
Range:
0 to 250
Factory
Setting:
7
Position Control
Error pulse
Internal speed reference
Pn107
Bias increment width
Pn108