Feed-forward functions, Bias function – Yaskawa Large Capacity Sigma II Series User Manual
Page 216
5.4 Servo Gain Adjustments
5-33
5
Feed-forward Functions
The responsiveness is increased by using one of the feed-forward functions. A feed-forward
function is not so effective, however, if the position loop gain is set to a high enough value.
Adjust the feed-forward set value of Pn109 as described below.
1. Adjust the speed loop and position loop according to the method described on
page 5-32.
2. Gradually increase the set value of Pn109 so that the positioning completion signal
(/COIN) will be output quickly.
Make sure that the positioning completion signal (/COIN) is not broken (i.e., turned ON
and OFF repeatedly within a short period) and that speed overshooting does not result.
These are likely to occur if the feed-forward value is too high.
It is possible to add a primary delay filter (to be set in Pn10A) to the feed-forward func-
tion. The primary delay filter may prevent the positioning completion signal from break-
ing and the system speed from overshooting.
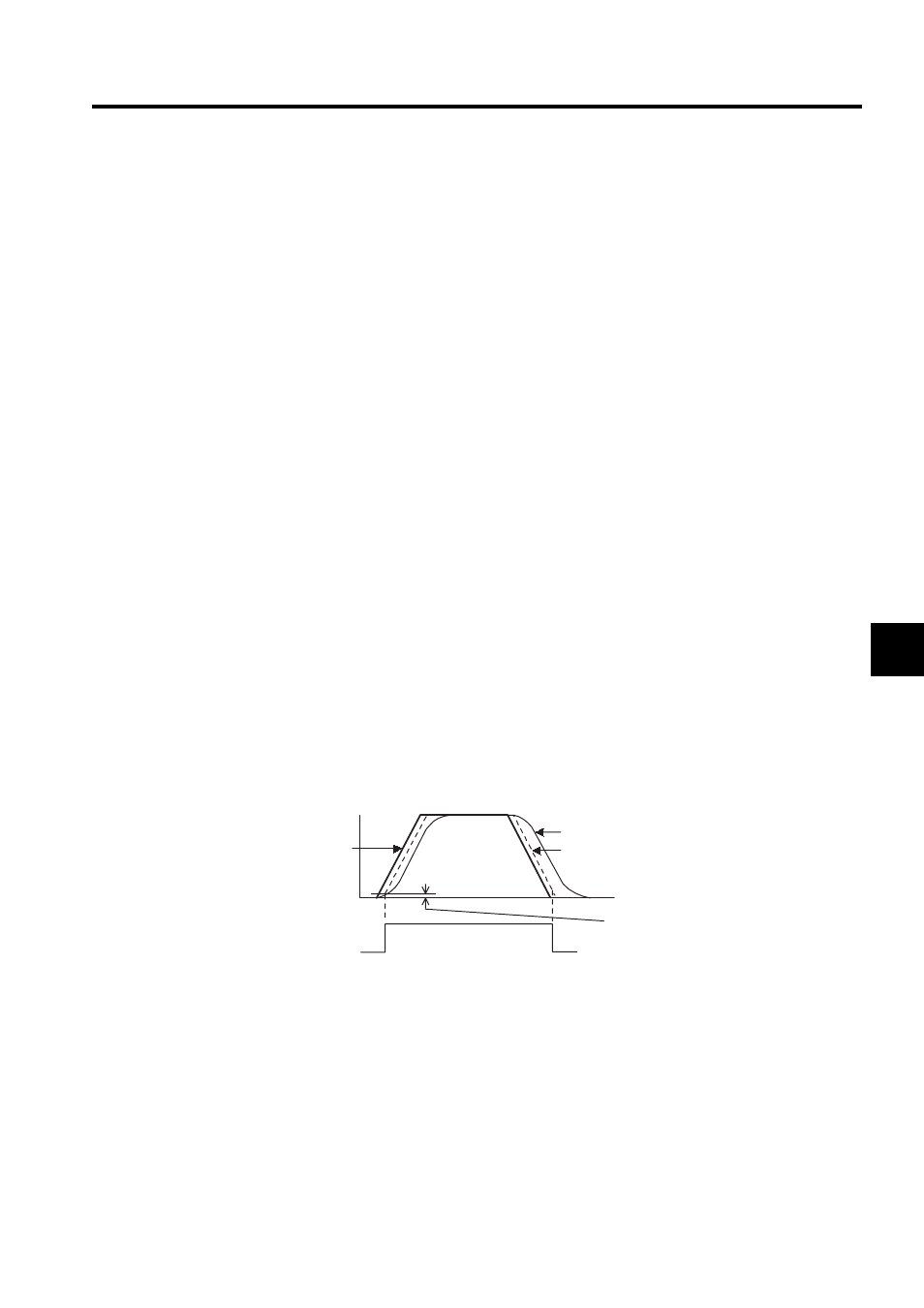
Bias Function
This function adds the bias set in Pn107 to the output (i.e., speed reference) of the error
counter if the number of accumulated pulses of the error counter exceeds the bias increment
width set in Pn108 and stops adding the bias if the output is within the bias increment width.
As a result, the number of accumulated pulses of the error counter decreases and the time
required for positioning can be shortened.
If the bias set value of Pn107 is too large, the motor rotation will be unstable. The optimum
bias value varies with the load, gain, and bias increment width. Make bias adjustments while
observing the response. When not using this function, set Pn107 to 0.
Speed
Speed
reference
Bias
Pn107
Motor speed without bias function
Motor speed with bias function
Time
ON
OFF
OFF
Bias increment width
(Accumulated pulse setting)
Pn108