5 using mode switch, Important – Yaskawa Large Capacity Sigma II Series User Manual
Page 193
5 Servo Adjustment
5.2.5 Using Mode Switch
5-10
5.2.5 Using Mode Switch
Use the mode switch function for the following purposes.
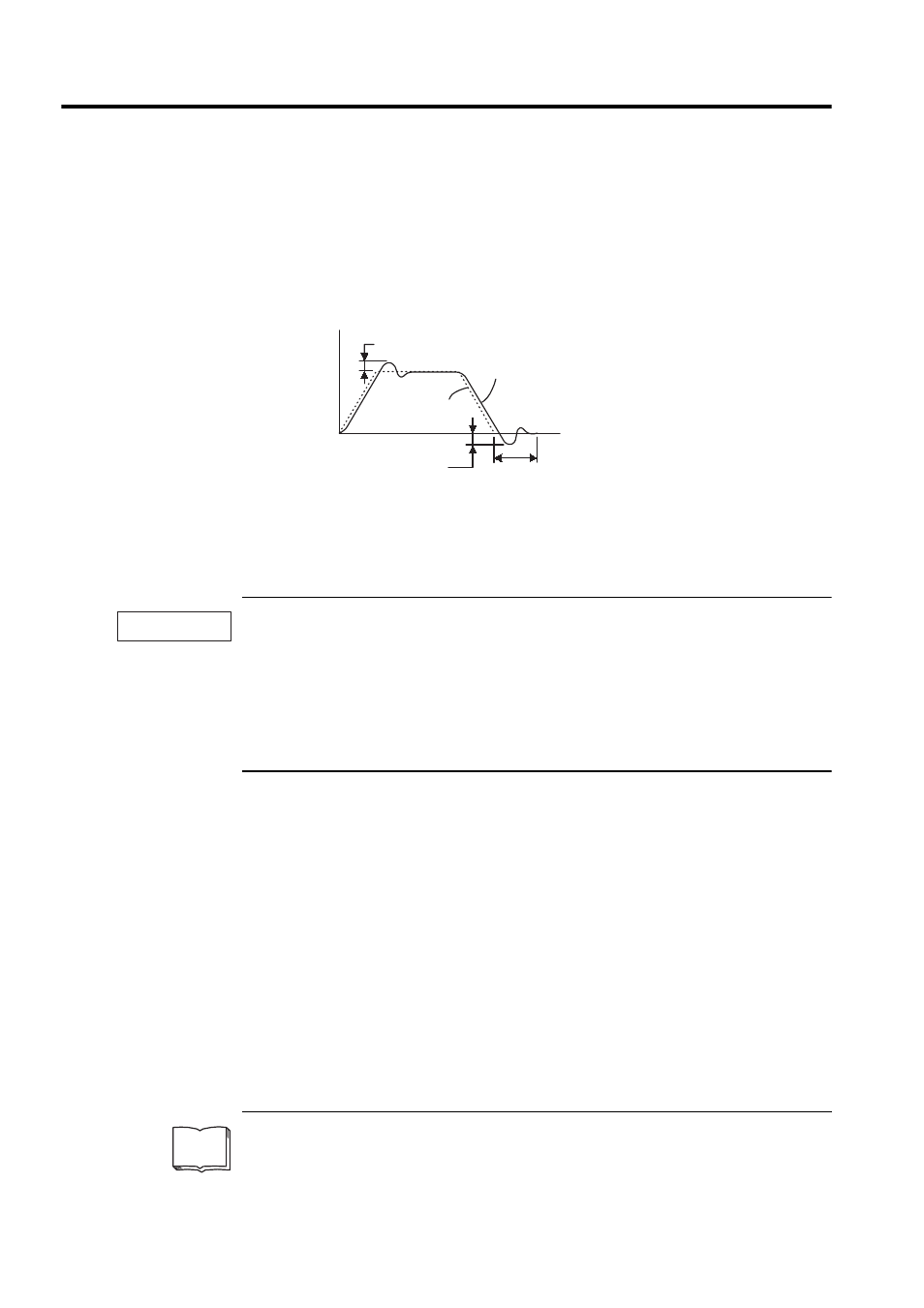
• To suppress overshooting during acceleration or deceleration (for speed control).
• To suppress undershooting during positioning and to shorten the setting time (for posi-
tion control).
The mode switch function makes it possible to automatically switch over the SERVO-
PACK’s internal speed control mode from PI to P control
1
mode and vice versa when speci-
fied conditions are satisfied.
1. The mode switch is used to fully utilize performance of a servodrive to achieve very high-speed
positioning. The speed response waveform must be observed to adjust the mode switch.
2. For normal use, the speed loop gain and position loop gain set by autotuning provide sufficient
speed/position control. Even if overshooting or undershooting occur, they can be suppressed by set-
ting the acceleration/deceleration time constant for the host device, the soft start time constants
(Pn305, Pn306), or position reference acceleration/deceleration constant (Pn204) for the SERVO-
PACK.
1
From PI control to P control
PI control means proportional/integral control and P control means proportional control. In short,
switching “from PI control to P control” reduces effective servo gain, making the servo system more
stable.
Actual motor operation
Overshooting
Speed
Reference
Setting time
Time
Undershooting
TERMS
IMPORTANT