5 using the electronic gear function, Setting the electronic gear – Yaskawa Large Capacity Sigma II Series User Manual
Page 105
4.2 Settings According to Host Controller
4-29
4
4.2.5 Using the Electronic Gear Function
The electronic gear function enables the servomotor travel distance per input reference pulse
to be set to any value. It allows the host controller generating pulses to be used for control
without having to consider the equipment gear ratio or the number of encoder pulses.
Setting the Electronic Gear
Calculate the electronic gear ratio (B/A) using the following procedure, and set the values in
parameters Pn202 and 203.
1. Check equipment specifications.
Items related to the electronic gear:
• Deceleration ratio
• Ball screw pitch
• Pulley diameter
2. Check the number of encoder pulses for the SGMBH servomotor.
The number of bits representing the resolution of the applicable encoder is not the same as the number
of encoder signal pulses (phase A and B) output from the SERVOPACK.
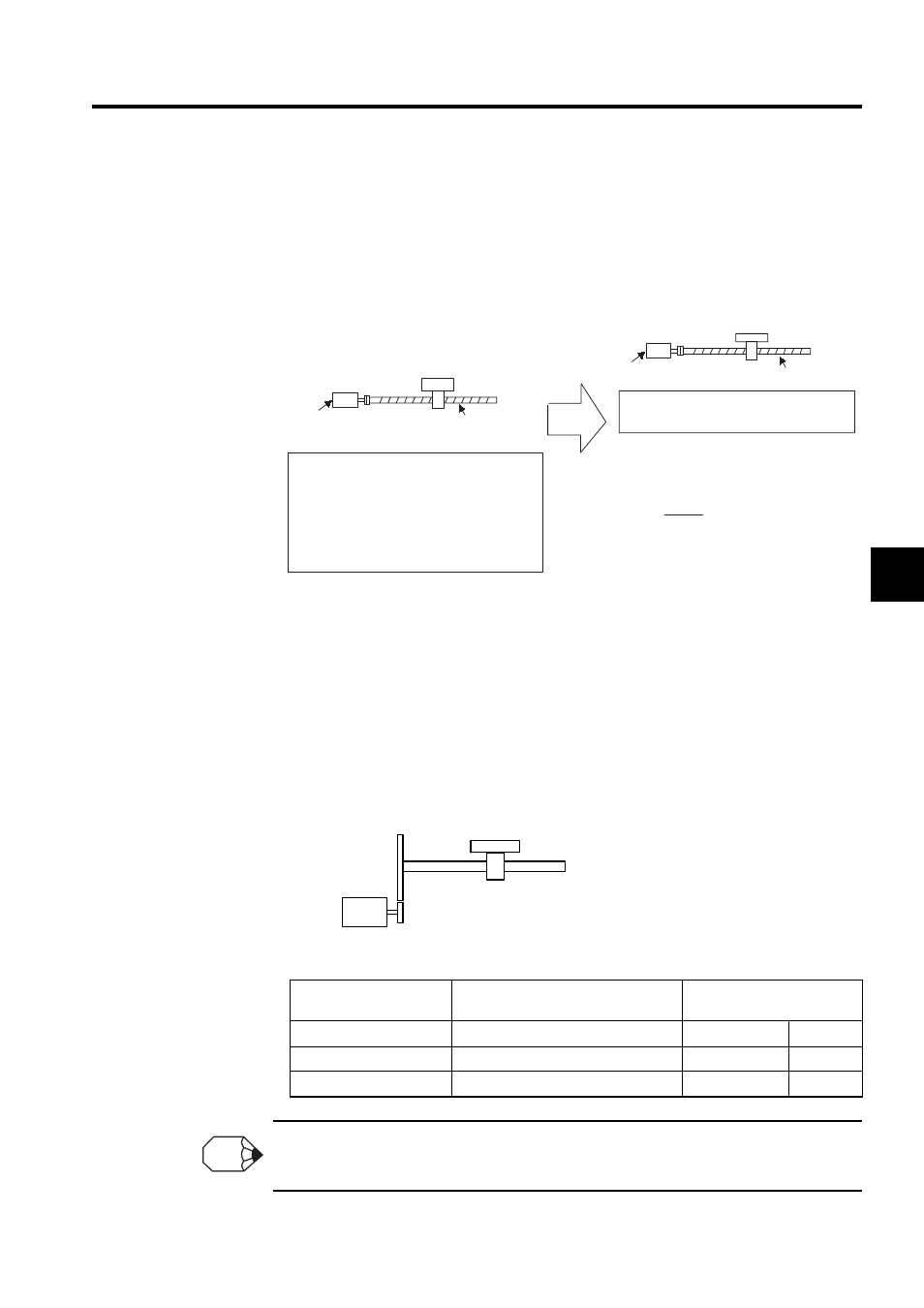
When the Electronic Gear
Function is Not Used
When the Electronic Gear
Function is Used
Ball screw pitch: 6 mm (0.24 in)
Workpiece
No. of encoder pulses: 2048
Equipment conditions and reference
units must be defined for the electronic
gear function beforehand.
To move a workpiece 10 mm (0.39 in):
Reference unit is 1
µm. Therefore,
Reference unit: 1
µm
To move a workpiece 10 mm (0.39 in):
1 revolution is 6 mm. Therefore,
10
÷
6 = 1.6666 revolutions.
2048
× 4 pulses is 1 revolution. Therefore,
1.6666
× 2048 × 4 = 13653 pulses.
13653 pulses are input as references.
The equation must be calculated at the
host controller .
No. of encoder pulses:
2048
10 m m
1
µ
= 10000 pulses
Workpiece
Ball screw pitch: 6 mm (0.24 in)
Servomotor Model and
Encoder Specifications
Encoder Type
Number of Encoder Pulses
Per Revolution (P/R)
C
Incremental encoder
17-bit
32768
2
Absolute encoder
17-bit
32768
3
Absolute encoder (option)
20-bit
262144
Ball screw pitch
Deceleration ratio
INFO