Yaskawa Large Capacity Sigma II Series User Manual
Page 71
3 Trial Operation
3.1.1 Step 1: Trial Operation for Servomotor without Load
3-8
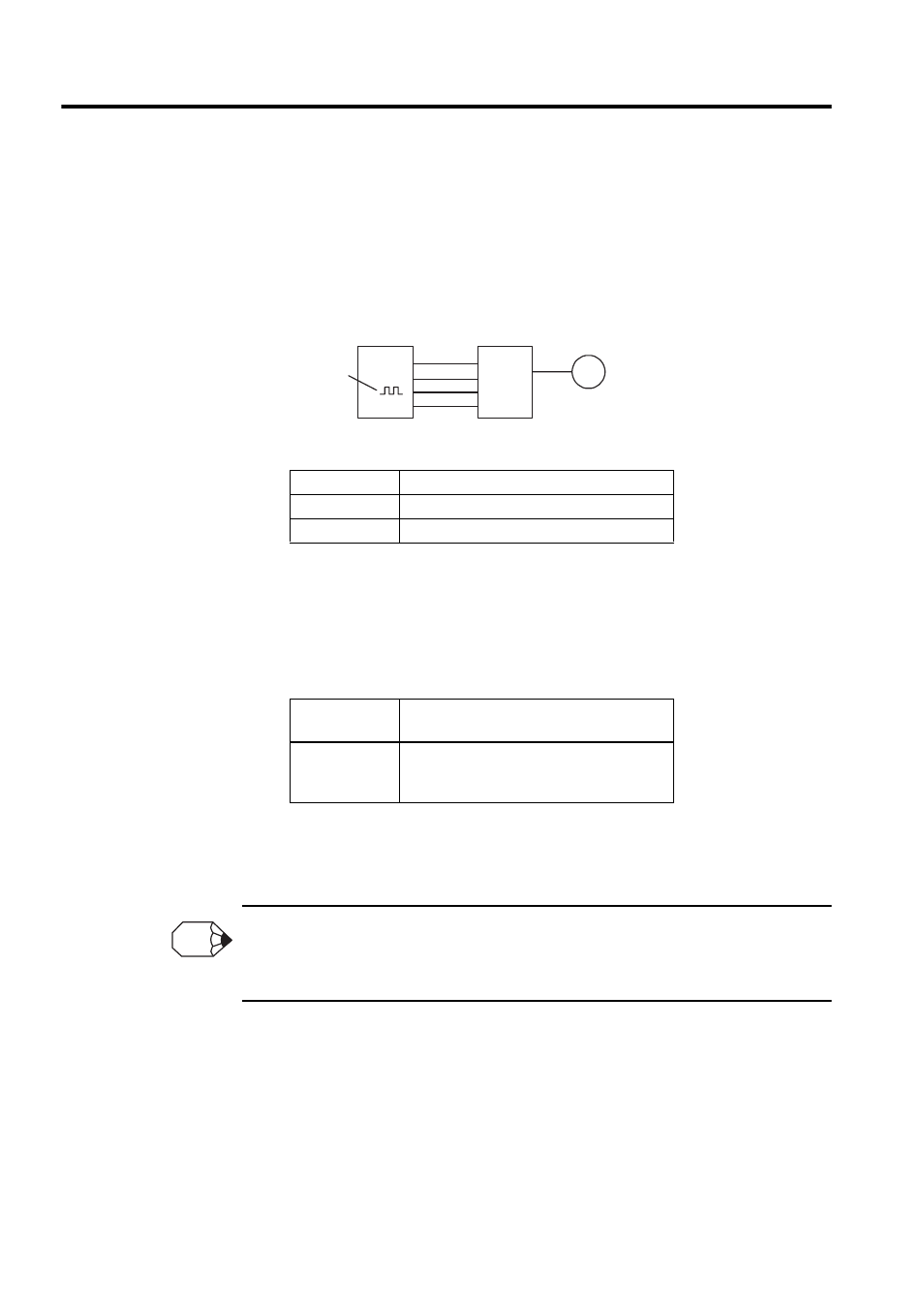
Operating Procedure in Position Control Mode: Set Pn000.1 to 1
1. Set the parameter Pn200.0 so the reference pulse form is the same as the host controller
output form.
Selecting the reference pulse form: See 4.2.2 Position Reference.
2. Input a slow speed pulse from the host controller and execute low-speed operation.
3. Check the following items in Monitor Mode. See 6.1.7 Operation in Monitor Mode.
• Has the reference pulse been input?
• Is the motor speed as designed?
• Does the reference pulse coincide with the actual motor speed?
• Does the servomotor stop when the reference pulse is turned OFF?
4. Reset the parameters shown below to change the motor speed or direction of rotation.
If an alarm occurs or the servomotor fails to operate during the above operation, CN1 con-
nector wiring is incorrect or parameter settings do not match the host controller specifica-
tions. Check the wiring and review the parameter settings, then repeat step 1.
Reference
• List of Alarms: See 8.2.3 Alarm Display Table.
• List of Parameters: See Appendix A List of Parameters.
Un000
Actual motor speed
Un007
Reference pulse speed display
Un008
Position offset
Pn202, Pn203
Electronic Gear Ratio
See 4.2.5 Using the Electronic Gear Function.
Pn000.0
Rotation Direction Selection
See 4.1.1 Switching Servomotor Rotation
Direction.
SERVOPACK
Servomotor
PULS
Host controller
Reference
pulse
/PULS
SIGN
/SIGN
(CN1-7)
(CN1-8)
(CN1-11)
(CN1-12)
INFO