Yaskawa Large Capacity Sigma II Series User Manual
Page 22
1 For First-time Users of AC Servos
1-8
3. Detector
A servo system requires a position or speed detector. It uses an encoder mounted on a
servomotor for this purpose. Encoders are divided into the following two types:
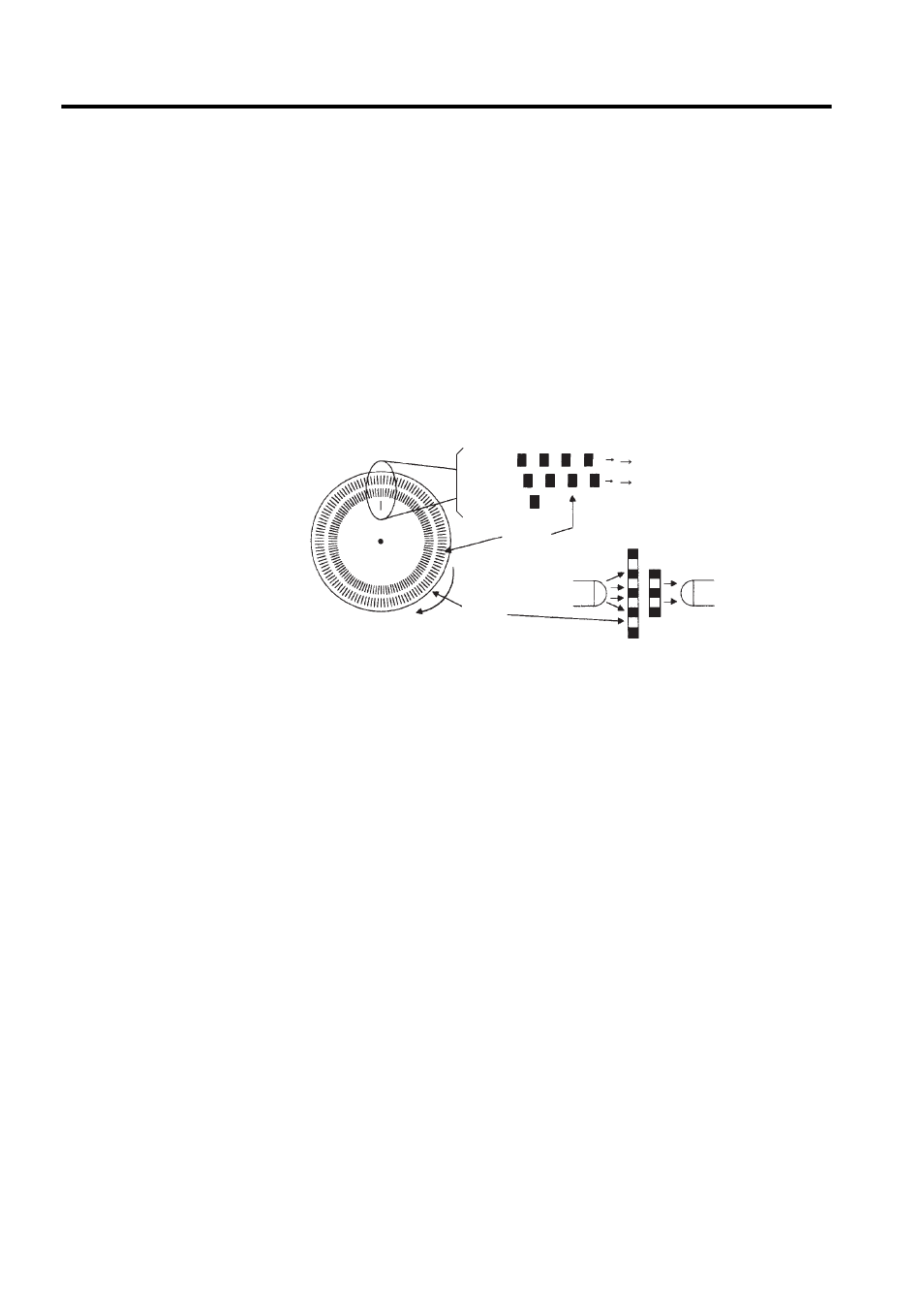
• Incremental Encoder
An incremental encoder is a pulse generator, which generates a certain number of pulses
per revolution (e.g., 2,000 pulses per revolution). If this encoder is connected to the
mechanical system and one pulse is defined as a certain length (e.g., 0.001 mm), it can
be used as a position detector. However, this encoder does not detect an absolute posi-
tion and merely outputs a pulse train. Hence zero point return operation must be per-
formed before positioning. The following figure illustrates the operation principle of a
pulse generator:
• Absolute Encoder
An absolute encoder is designed to detect an absolute angle of rotation as well as to per-
form the general functions of an incremental encoder. With an absolute encoder, there-
fore, it is possible to create a system that does not require zero point return operation at
the beginning of each operation.
• Difference between an Absolute and Incremental Encoder
An absolute encoder will keep track of the motor shaft position even if system power is
lost and some motion occurs during that period of time. The incremental encoder is
incapable of the above.
Phase A pulse train
Phase B pulse train
Slit
Center of
revolution
Fixed slit
Light-emitting
element
Light-receiving
element
Rotary
disc
Rotary slit
Phase A
Phase B
Phase Z