Direction of rotation selection, Example of contact input speed control operation – Yaskawa Large Capacity Sigma II Series User Manual
Page 113
4.2 Settings According to Host Controller
4-37
4
The contact input speed control function is used only when signals are allocated to /SPD-D, /SPD-A,
and /SPD-B.
Direction of Rotation Selection
The input signal /P-CON (/SPD-D) is used to specify the direction of servomotor rotation.
• When contact input speed control is used, the input signal /P-CON (/SPD-D) specifies
the direction of servomotor rotation.
Note: 0: OFF (high level); 1: ON (low level)
When contact input speed control is not used, the /P-CON signal is used for proportional
control, zero clamping, and torque/speed control switching.
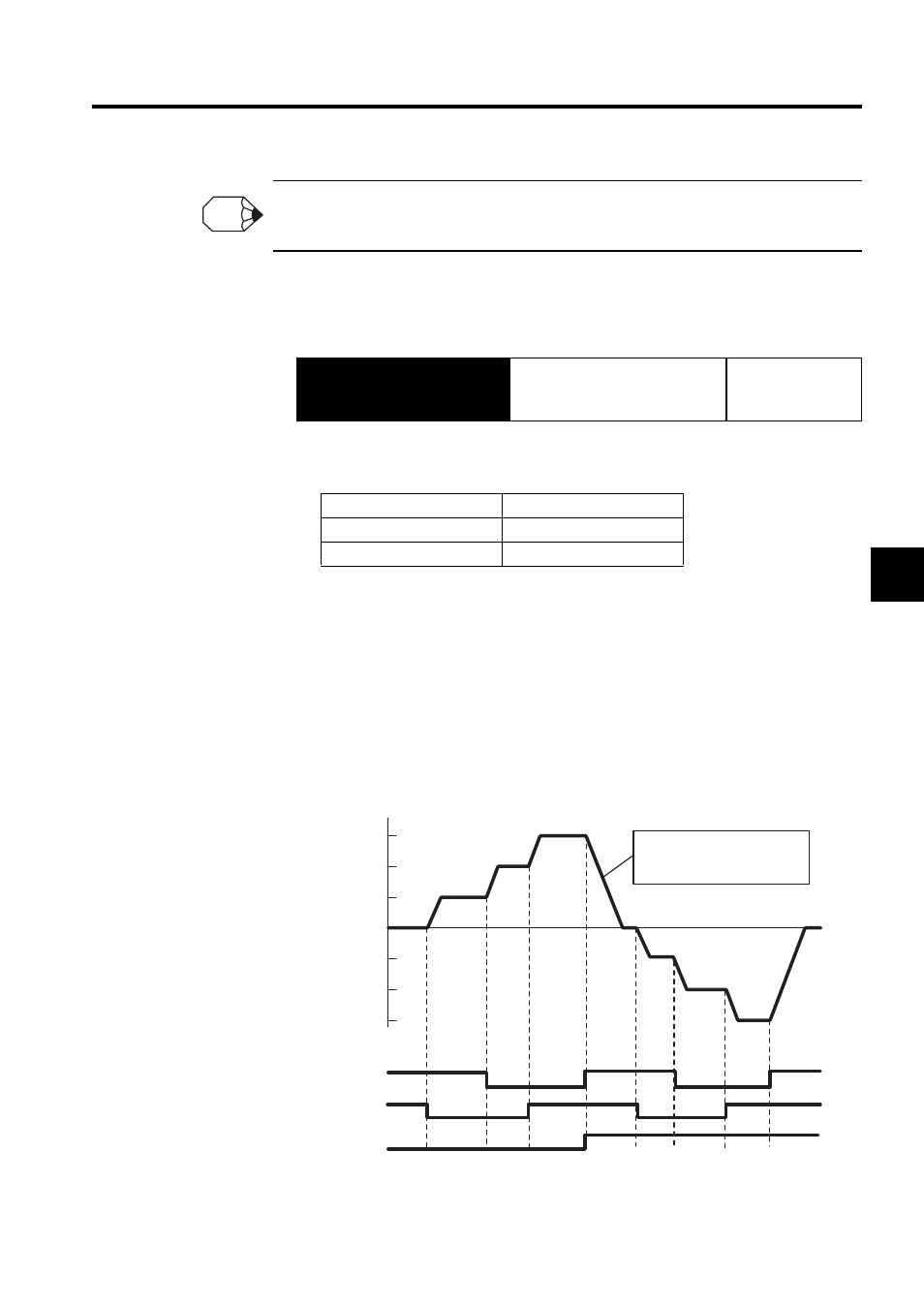
Example of Contact Input Speed Control Operation
The following example shows operation by contact input speed control. Using the soft start
function reduces physical shock when the speed is changed.
→ Input P-CON CN1-41
Proportional Control Reference,
etc.
Speed/Torque
Control,
Position Control
/P-CON (/SPD-D)
Meaning
0
Forward rotation
1
Reverse rotation
INFO
- SPEED 1
Motor speed
+SPEED 3
+SPEED 2
+SPEED 1
- SPEED 2
- SPEED 3
0
OFF
ON
Speed 1
Stop
Set
Contact Input Speed Control
acceleration and
deceleration at Pn305 and
Pn306 (soft start times).
/P-CL (/SPD-A)
/N-CL (/SPD-B)
/P-CON(/SPD-D)
Speed 2
Speed 3
Stop
Stop
Speed 1
Speed 2
Speed 3
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
ON
ON
ON
ON
ON
ON
ON
ON
ON
ON